Сада бих желео да вам све упознам са магијом роботичке сензорске технологије коју је Мињу развио у последње време. То је најсавременија технологија која мења начин на који роботи функционишу помажући им да осећају и виде свет. Дакле, да се уђемо мало дубље и схватимо како ће роботи бити ефикаснији и поузданији са Робо сензорима.
Робо сензори из Минијуа помажу роботима да раде паметније, а не теже. Ови сензори могу да открију препреке, мере удаљености и чак да идентификују боје. То су разлози зашто је Робо сензор веома користан за робота да се креће сам у затвореном подручју са многим препрекама током своје радне линије и има за циљ да све уради близу савршенства без сукоба. То је омогућило роботима да раде брже и боље него у било које друго време.
Као и у случају Робо сензора из МИНИУЕ-а, они су познати по својој поузданости и тачности. Роботи су у стању да брзо доносе одлуке и прилагођавају се користећи податке прикупљене у реалном времену од ових сензора. Да ли ће робот заиста радити као што треба зависи у великој мери од тачности и квалитета сензорских података који му говоре о његовом радном окружењу тако да увек може да даје свој најбољи напор. Робо сензори Робо сензори се користе за помоћ роботима ласерски сензор изузимајући задате за које су дизајнирани било да то значи да покупите предмете, сортирате предмете или стискате кроз тесни простор, Робо сензори се побрину да се посао уради са прецизношћу и брзином.
Подруштва могу побољшати ефикасност и смањити трошкове са MINYUE Robo сензорима. Изавршавање сложених радова са повећаном брзином и прецизношћу у мање времена је још једна предност тога што су ови сензори на роботима. То резултира укупним повећањем продуктивности. Осим тога, они могу бити трошковно ефикасна опција за предузећа спречавањем грешака / смањењем трошкова грешака и побољшањем укупне тачности, односно области у којој се заиста може направити финансијска уштеда у смислу прераде и материјала који ће се отклањати, посебно компоненте високе вредности и сирови Миниуе-ова решења за робо сензоре дизајнирана су да повећају продуктивност и уштеду трошкова за компаније.

Робо сензори се лако уклапају у било који роботски систем, без нултиног прилагођавања и напора за подешавање. РОБО сензори се лако могу интегрисати у ваше роботе, будући нови независни додатак или надоградња постојећих уређаја које имате! Ова интеграција спречава да ваша цевоводна линија буде неактивна или прерано прекинута, тако да одмах можете почети да користите технологију Робо сензора. Минијум Типови сензора за роботе : Са сензорима без напора MINYUE предузећа могу побољшати функционисање својих робота.
Минију је посвећен пружању одличних решења и услуга за робо сензоре који задовољавају очекивања купаца. Са чврстим материјалима и врхунском најсавременијом технологијом, наши сензори издржавају тест времена. Задовољство купца је важно за нас, због чега увек покушавамо да урадимо најбоље што можемо са нашим Робо сензором технологијом. Миниуе има целу линију индуктивних Робо сензора за предузећа да бирају, и они могу бити сигурни да Минуе сензор за роботе понуде је најбољи квалитет доступан поддржани свеобухватним корисничком услугом и подршком.
Брза, тачна, потпуно без програмирања, висока ефикасност и висока прецизност. Решава компликовани наставни процес традиционалних робота и штеди време за одлазак наставног процеса.
Обезбедити снажно оптерећење предњег слојања робота, бочно оптерећење, обрнуто оптерећење, монтажу портије, интелигентно планирање трајекторије за више робота, више спољних осија и позиционирач за сарадњу. Реализовати симулацију кретања робота, детекцију сукоба, избегавање сингуларности и детекцију границе оси.
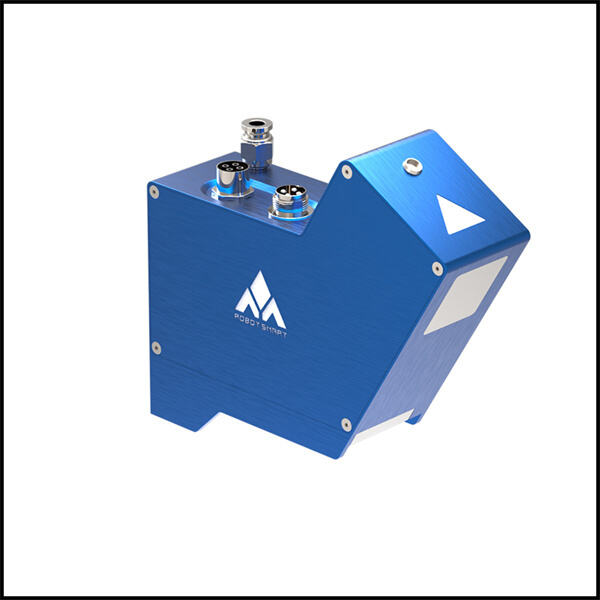
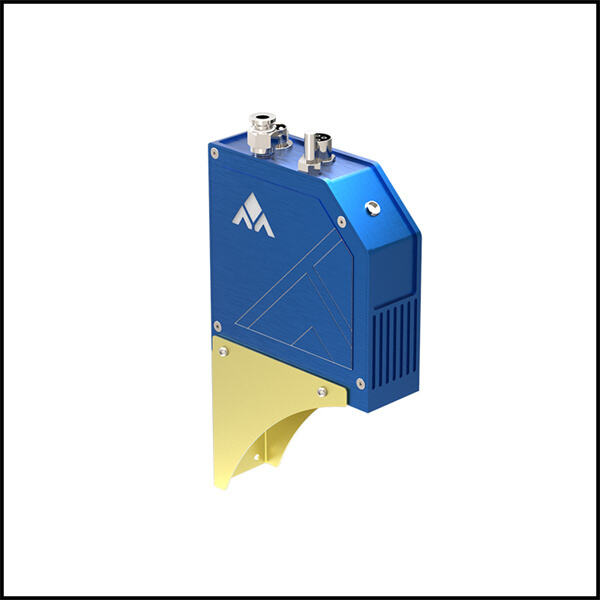
Пекинг Мињуе Технологија Цо., ЛТД, као водеће светско високотехнолошко предузеће не-научавања интелигентне апликације индустријских робота. Специјализовали смо се за флексибилну интелигентну производњу са нашим саморазвијеним РоботСмарт - интелигентним системом доношења одлука, С Да обезбеди нову генерацију интелигентних решења за заваривање и резање робота.
Прихватање функције тражења и праћења, скенирања заваривачког шваба, потврђивања положаја и информација заваривачког шваба, корекције положаја заваривачког шваба између цртања 3Д дигиталног модела и стварног радног комада и решавања проблема заваривања због грешке дола
 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK








