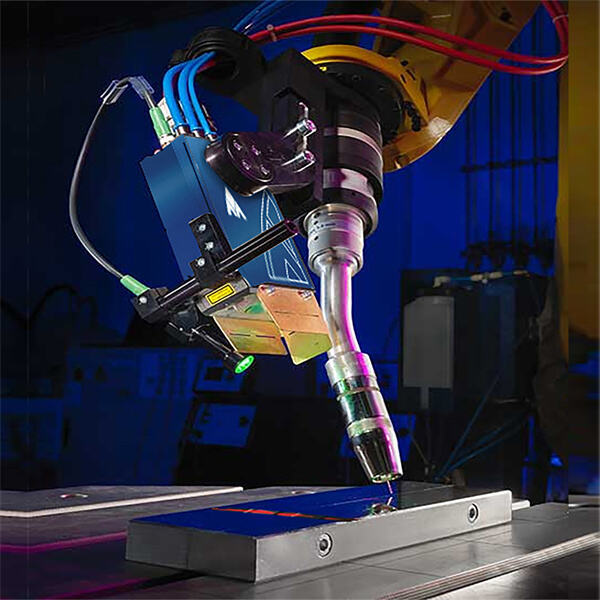
Роботизована ћелија за заваривање састоји се од више компоненти које међусобно комуницирају да би извршиле процес заваривања. Први део је робот. Робот је механичка рука која врши сварење. Везан је за компјутер који му даје инструкције о томе где да иде и како да се креће. На крају роботове руке налази се заваривачки алат који му омогућава да завари металне комаде заједно.
Компаније користе роботизоване ћелије за заваривање како би помогле фабрикама да буду брже и ефикасније. Један од лепих аспеката њих је то што могу да трче цело време без пауза. То значи да могу производити производе брже него што људи раде. Ова фабрика има неколико робота који могу да раде непрестано када људи морају да спавају или да се одморе, што је од кључног значаја током производње.

Што се тиче прецизности, роботизоване ћелије за заваривање су такође изузетно поуздане. Они не уморају као људи, тако да могу да раде дуги временски период без грешке. Постоји таква конзистенција
Роботизоване ћелије за заваривање, поред побољшања фабричких операција, штеде новац. Поможу да се смањи трошак радног труда јер могу радити без потребе за људским радницима. За пословање као што су производње трошкови радног труда
У Мињуеу има много различитих врста роботизованих заваривачких ћелија. Они су различитих величина, од малих машина које могу да се баве малим пројектима до великих машина одговорних за велике послове.
Пекинг Мињуе Технологија Цо., ЛТД, као водеће светско високотехнолошко предузеће не-научавања интелигентне апликације индустријских робота. Специјализовали смо се за флексибилну интелигентну производњу са нашим саморазвијеним РоботСмарт - интелигентним системом доношења одлука, С Да обезбеди нову генерацију интелигентних решења за заваривање и резање робота.
Брза, тачна, потпуно без програмирања, висока ефикасност и висока прецизност. Решава компликовани наставни процес традиционалних робота и штеди време за одлазак наставног процеса.
Обезбедити снажно оптерећење предњег слојања робота, бочно оптерећење, обрнуто оптерећење, монтажу портије, интелигентно планирање трајекторије за више робота, више спољних осија и позиционирач за сарадњу. Реализовати симулацију кретања робота, детекцију сукоба, избегавање сингуларности и детекцију границе оси.
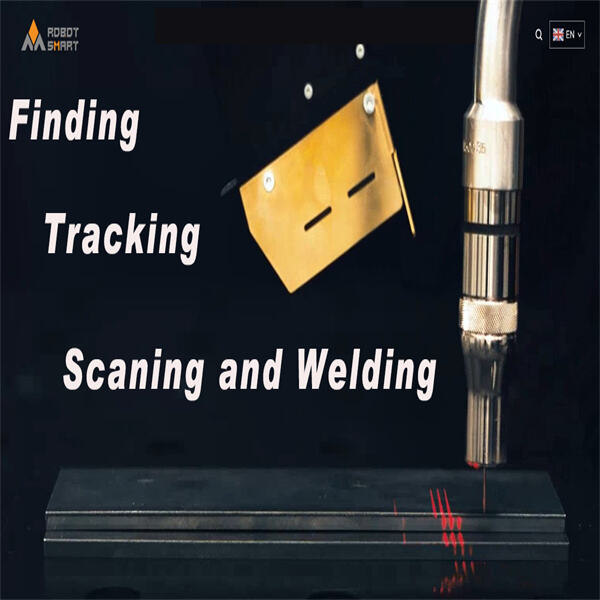
Прихватање функције тражења и праћења, скенирања заваривачког шваба, потврђивања положаја и информација заваривачког шваба, корекције положаја заваривачког шваба између цртања 3Д дигиталног модела и стварног радног комада и решавања проблема заваривања због грешке дола
 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK








