համար: Դրանք ռոբոտների ինչ-որ չափով աչքերն ու ականջներն են: Ինչպես մեր ...">
Սա նշանակում է, որ սենսորները կարևոր են աԼ ռոբոտ նրանք որպես մի տեսակ են ռոբոտների աչքերը և կանգները։ Երբ մեր աչքերը թույլ են տալիս տեսնել, ինչպես մեր կանգները թույլ են տալիս լսել, սենսորները թույլ են տալիս ռոբոտներին տեսնել և հասկանալ իրենց շուրջընթացքը։ Ռոբոտները նաև կարող են սովորել իրենց շուրջավորման մասին տարբեր սենսորների միջոցով։ Նրանք կարող են գրանցել ինչ-որ բանի շարժը, ձայնը, շոշփումը և mooieնում է որոշել, թե որքան հեռու է ինչ-որ բան։ Սենսորները անհրաժեշտ են, քանի որ նրանք թույլ են տալիս ռոբոտներին ան전 գնահատել ճանապարհները, կազմել որոշումներ և փոխազդել իրենց շուրջավորման հետ։
Ռոբոտիկայում MINYUE սենսորները դրանց գործունեության կենտրոնական մաս են՝ օգտագործելով դրանք տրված առաջադրանքների համար։ Սենսորները տալիս են ռոբոտներին անհրաժեշտ տեղեկատվությունները՝ ճշգրիտ և արդյունավետ կատարելու իրենց աշխատանքը։ Ռոբոտները գրեթե անհանգստ կլինեն նշել իրենց ճանապարհում գտնվող օբյեկտները, հանգստացնել հարցականությունները և նույնիսկ հետևել մարդկանց տրված ուղղություններին՝ առանց սենսորների։ Սենսորները. Դուք կարող եք մտածել սենսորներին որպես ռոբոտների ուղերներին, քանի որ դրանք խաղացում են մեծ դեր նրանց միջոցով, ինչպես նրանք գիտեն իրենց շուրջավորումը և անցնում են ռեակցիա։
Տարբերակային սենսորները՝ տարբերակային սենսորները տալիս են ռոբոտներին հնարավորություն զգալ և փոխազդել իրենց միջավայրում գտնվող օբյեկտների հետ: Երբ ռոբոտը հանդիսանում է օբյեկտին, այն կախված է տարբերակային սենսորից՝ ինֆորմացիա ստանալու համար, ինչպես որ պատրաստվի այն արտապատկերել։
MINYUE Ավտոնոմ ռոբոտները ռոբոտներ են, որոնք կարող են աշխատել անկախաբար մարդկանց միջավայրում մեծ չափումով։ Այս ռոբոտների աշխատանքը հիմնված է շատ սենսորների վրա, ինչպիսիք են՝ լազերային լուսավոր սենսոր որոնք օգտագործվում են իրենց միջավայրը համարյալու և ավտոնոմ ձեռնարկելու համար։ Նախ դուրս գանք մի քանի կարևոր կոմպոնենտներին՝ ավտոնոմ ռոբոտների մասին։
The կառավարական ինտելեկտով ռոբոտներ ավելացնելու իրենց հնարավորությունները և ավելի արդյունավետ կատարելու առանց տարբեր սենսորների օգտագործման։ Օրինակ, լույսի սենսորները կարող են օգնել ռոբոտներին գտնել լույսը և հետևել այն։ Սա նշանակում է, եթե լույսը մահացնում է, ռոբոտը կմոտենա։ Լսողական սենսորներ՝ ռոբոտները կարող են պատասխանել ձայնային հրամաններին։ Ձայնային սենսորը կարող է տեղեկացնել ռոբոտը, թե ինչ է ասում այն մարդը, որը խոսում է։
Կան ՄԻՆՅՈՒԵ ուղեղի սենսորներ և լազերային սենսոր որոնք տալիս են ռոբոտներին հնարավորություն փոխազդել շուրջընկած օբյեկտների հետ։ Օրինակ, եթե ռոբոտը շոգ է դեպի պատեր, ուղեղի սենսորը ասում է ռոբոտին կանգ առնել առաջ շարժվելուց։ Տրանսպորտային լամպերը կառավարում են միջոցների հոսքը ճանապարհում։ Դրանք կարող են նաև չափել, թե որքան հեռու է օբյեկտը, որպեսզի ռոբոտը անվտանգ շարժվի շուրջ արագացնելուց առանց։

Վերաբերյալ վերը, մենք կարող ենք տեսնել, որ սենսորները կարևոր բաղադրություններ են ռոբոտիկայի տեխնոլոգիայի մեջ։ Դրանք թողնում են ռոբոտներին զգալ և շոշափել միջավայրը։ Սենսորների տարբեր տիպերի և դրանց միակ դերի իմաստացումը ռոբոտիկայի մեծ նկարի մեջ, մեզ կօգնի գնահատել այդպիսի փոքր բաղադրությունների תרանսպորտային տեխնոլոգիայի մասամբ դերը։
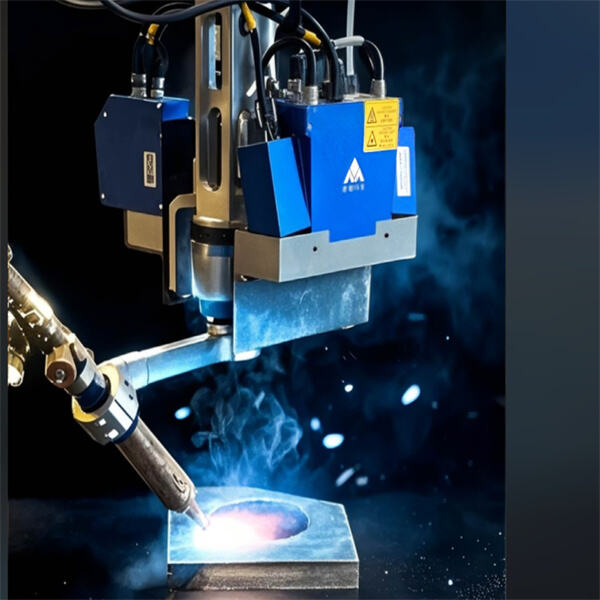
Օգտագործում է գտնելու և հետևելու ֆունկցիան, սկանավորելով վիճbum հատվածը, հաստատելով վիճbum հատվածի դիրքը և տեղեկատվությունը, որպեսզի حيحուղանակենք վիճbum դիրքը միջև 3D թվային մոդելային գծագրում և իրական աշխատանքային մասին, լուծելով վիճbum սխալների պատճառով մուտքային նյութերի սխալների և ջերմային դեֆորմացիայի պատճառով։
Առաջարկում է հզոր վիճակագրական ռոբոտ, որը ենթադրում է առաջի բեռնում, կողմից բեռնում, փոխադարձ բեռնում, գանտրի մուտք, բանավեճ տրայեկտորիայի պլանավորում մի քանի ռոբոտների համար, մի քանի արտաքին առանցքների և դիրքաշրջի համատեղումների: Հասնում է ռոբոտի շարժման միմաստիկական մոդելավորման, հարթադիրքի հայտնաբերում, միակության հանգումից խուսափումին և առանցքի սահմանների հայտնաբերում։
Beijing Minyue Technology Co.,LTD, որը համարվում է աշխարհի նախկին գեղատեսական տехնոլոգիայի կազմակերպությունը՝ արդյոք ինդուստրիալ ռոբոտների ոչ տարածաշրջանային ինտելեկտուալ կիրառման ոլորտում։ Մենք մասնագետ ենք առանց ծրագրավորման սեփական ինտելեկտուալ UFACTURING-ի վրա, օգտագործելով մեր սեփական արտադրած RobotSmart - Ինտելեկտուալ 抉cision Making System, SmartVision - Binocular Structured Light Vision System և SmartEye - Laser Vision Seam Tracking System։ Առաջարկում ենք նոր գերասենյակային ինտելեկտուալ ռոբոտային համեմատում և ստիրում լուծումներ։
Արագ, ճշգրիտ, լինելով անծրագրային, բարձր արդյունավետությամբ և բարձր ճշգրտությամբ։ Դա լուծում է pä դարձնում է ավելի հեշտ այն բարդ ուսուցման գործընթացը, որը հանդիսանում է تقليստական ռոբոտների համար, ավելացնելով ուսուցման գործընթացի կանգ ժամանակը։
 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK








