Շիկ ռոբոտները ավելի ու ավելի են դառնում իրականություն: Դուք կարող եք ասել, որ դրանք կարող են լինել գործարաններում, հիվանդանոցներում, եւ նույնիսկ այն վայրում, որտեղ մենք ապրում ենք: Այս ավտոմատացված 捍дինգ ռոբոտ ստեղծվել են մտածելու, սովորելու եւ մարդկանց նման գործելու համար, որպեսզի կարողանան կատարել շատ տարբեր գործեր: "Ամեն ինչ կարող է լինել լավ, եթե մենք նրանց հետ միասին լինենք" Նրանք օգտագործում են որոշ շքեղ իրեր, ինչպիսիք են սենսորները եւ տեսախցիկները, որպեսզի ինքնուրույն նավարկեն եւ գործեն: Այս տեխնոլոգիայի շնորհիվ նրանք կարող են ընկալել շրջակա միջավայրը նույն կերպ, ինչպես մենք, երբ շրջապատում ենք եւ որոշում ենք, թե ինչ անել հաջորդ քայլը:
Խելացի տեխնոլոգիաները բավականին փոխել են մեր ապրելակերպը, աշխատանքը եւ խաղը, հատկապես ռոբոտների համատեքստում: Այն փոխել է մեր աշխատանքային, ուսման եւ նույնիսկ խաղալու եղանակը: Այս иնդուստրիալ համեմատական ռոբոտ կարող են կատարել աշխատանք, որոնք միայն երեւում էինք, որ կարող են կատարվել մարդկանց կողմից, սա հետաքրքիր է: Նրանք օգտագործվում են գործkedտուններում բաժանելու համար բանալիքներ, որը արագացնում է և դարձնում է պրոցեսը ավելի արդյունավետ: Բուժարաններում, նրանք օգնում են գործարարությունների ժամանակ, համոզվելու համար, որ բոլոր գործիքները են նրանց պետք տեղերում, և որ գործարարական տարածքը պատրաստված է, ներառյալ այլ խնդիրներ:
Ռոբոտներ հոգի հետ շարունակվող աշխատանքները փոխել են շատ գործունեությունները տարբեր սեktorներում: Բայց այդ մեքենաները նաև արագացնում են պրոցեսները, ինչպես օրինակ գործարաններում, որը օգնում է նվազեցնել սխալները, որոնք հաճախ տեղի ունենում են, երբ արդյոք մարդիկ են աշխատում: Նրանք կարող են արագ և ճշգրիտ կատարել կրկնության աշխատանքներ, ինչը օգնում է պահպանել արտադրության ժամանակացույցը: Առողջապաշտպանության ոլորտում նրանք օգնում են բժիշկներին ախտորոշելու և բուժելու համար հասարակներին: Նրանք կարող են օգնել նման բաներին, ինչպես՝ գրել նշումներ կամ տալ տեղեկատվություն հասարակի առողջության մասին, ազատացնելով բժիշկներին ավելի շատ ժամանակ անցնելու հասարակների հետ: Ռոբոտները նաև օգտագործվում են որոշ գործատներում գոնելու և հավաքելու համար բույսները, խանգարություն և աշխատանք խանգարողացնելու համար: Այս MINYUE robot laser welding machine փոխում են մեր ձեռքով անցկացնող բաները և օգնում են ավելի արագ և արդյունավետ արդյունավետությամբ արդյունավետությամբ:

Սովորական մարդի և ռոբոտների համագործակցության պատասխանները իրավիճակային են։ Տեխնոլոգիայի ավելի շատ զարգացման ժամանակ MINYUE ռոբոտների ավելի շատ կլինեն մարդկանց օգնությամբ այլ աշխատանքներում և ոլորտներում։ Այս համագործակցությունը մեզ կթողնի ավելի շատ անել և գերազանցել այն բաները, որոնք մենք չենք կարող անել միայն մեր ուժերով։ Եթե մարդիկ և ռոբոտները միասին օգնում են մեկ մյուսին, ապա ավելի լավ արդյունավետություն է հնարավոր։ Օրինակ, ռոբոտը կարող է անել անկարող բանը, իսկ մարդը՝ կենտրոնացնելով կարևոր որոշումների վրա։
Կա շատ դեպի ամենասովոր ռոբոտներին, բայց կան նաև հիմնական հարցեր և տարատեսակներ, որոնք պետք է դիտարկենք։ Օրինակ, MINYUE ռոբոտները, որոնք կարող են հավաքել տեղեկատվություն մեր մասին և օգտագործել այն, բացակայում են նոր գաղտնապահության և անվտանգության հարցեր։ Նրանք կարող են դառնալ նորոգում իրենց 개인ային տվյալների վերաբերյալ։ Հանդիսանում է նաև ռոբոտների պատճառով մարդկանց աշխատանքների կորցանումը, և պետք է այն մասին մտածենք։
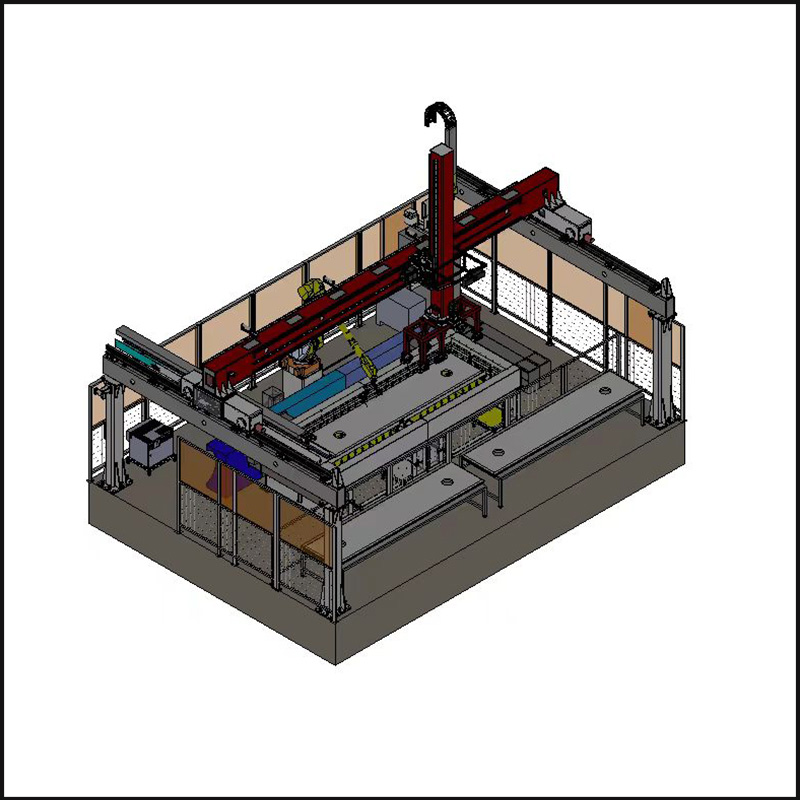
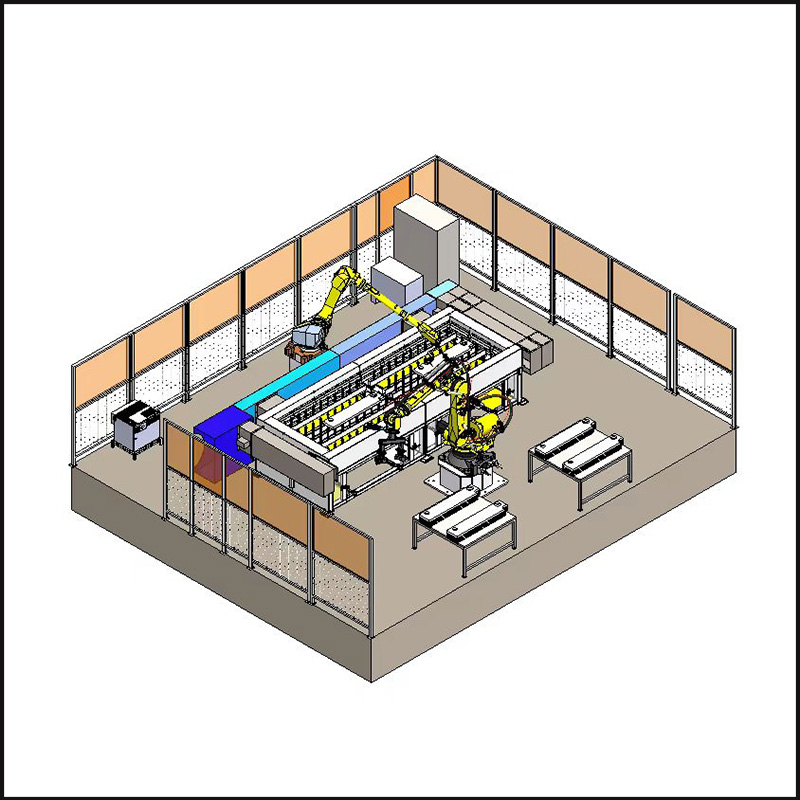
Առաջարկում է հզոր վիճակագրական ռոբոտ, որը ենթադրում է առաջի բեռնում, կողմից բեռնում, փոխադարձ բեռնում, գանտրի մուտք, բանավեճ տրայեկտորիայի պլանավորում մի քանի ռոբոտների համար, մի քանի արտաքին առանցքների և դիրքաշրջի համատեղումների: Հասնում է ռոբոտի շարժման միմաստիկական մոդելավորման, հարթադիրքի հայտնաբերում, միակության հանգումից խուսափումին և առանցքի սահմանների հայտնաբերում։
Beijing Minyue Technology Co.,LTD, որը համարվում է աշխարհի նախկին գեղատեսական տехնոլոգիայի կազմակերպությունը՝ արդյոք ինդուստրիալ ռոբոտների ոչ տարածաշրջանային ինտելեկտուալ կիրառման ոլորտում։ Մենք մասնագետ ենք առանց ծրագրավորման սեփական ինտելեկտուալ UFACTURING-ի վրա, օգտագործելով մեր սեփական արտադրած RobotSmart - Ինտելեկտուալ 抉cision Making System, SmartVision - Binocular Structured Light Vision System և SmartEye - Laser Vision Seam Tracking System։ Առաջարկում ենք նոր գերասենյակային ինտելեկտուալ ռոբոտային համեմատում և ստիրում լուծումներ։
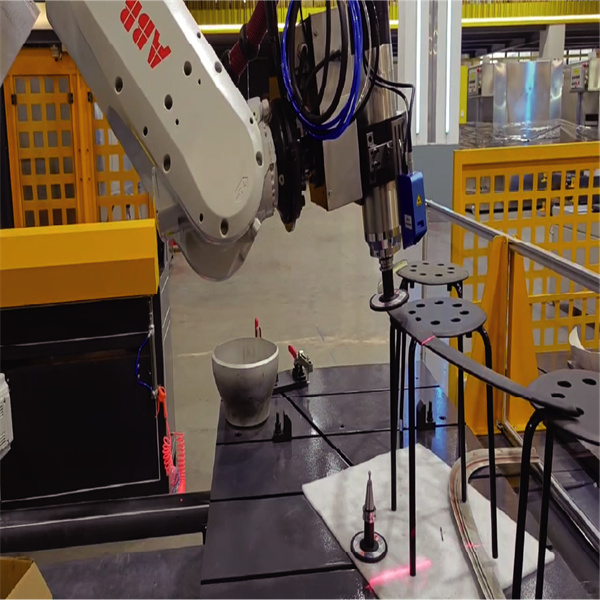
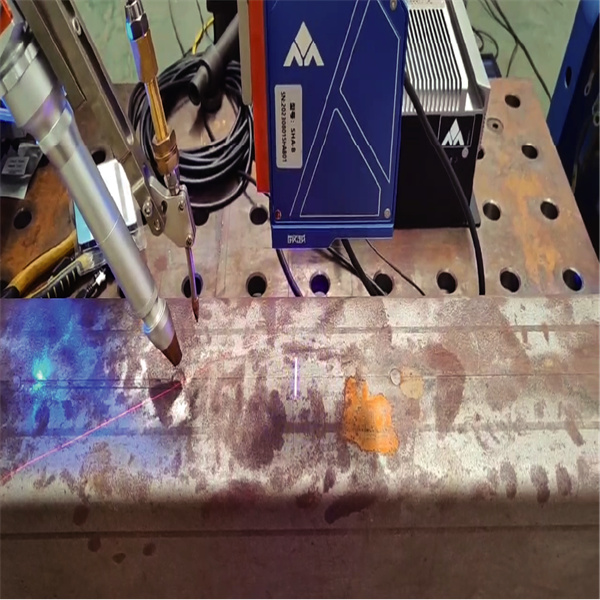
Օգտագործում է գտնելու և հետևելու ֆունկցիան, սկանավորելով վիճbum հատվածը, հաստատելով վիճbum հատվածի դիրքը և տեղեկատվությունը, որպեսզի حيحուղանակենք վիճbum դիրքը միջև 3D թվային մոդելային գծագրում և իրական աշխատանքային մասին, լուծելով վիճbum սխալների պատճառով մուտքային նյութերի սխալների և ջերմային դեֆորմացիայի պատճառով։
Արագ, ճշգրիտ, լինելով անծրագրային, բարձր արդյունավետությամբ և բարձր ճշգրտությամբ։ Դա լուծում է pä դարձնում է ավելի հեշտ այն բարդ ուսուցման գործընթացը, որը հանդիսանում է تقليստական ռոբոտների համար, ավելացնելով ուսուցման գործընթացի կանգ ժամանակը։
 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK