Օրինակ, համեմատության համար, վիդոցի միացման հետևանքագիր սենսորները դաշտական ավտոմատացման արդյունավետ սարքեր են, որոնք օգնում են աշխատողներին պահել ճիշտ վիդոցի համակարգը: Մեծ գործked-ներում, այս սենսորները ունեն շատ կարևոր դեր, քանի որ ամենօր արտադրվում են շատ տարբեր արտադրանքներ: Ավելի մանրամասն դիտարկեք և գիտեք ավելի շատ այս օգտակար սարքերի մասին:
MINYUE վիդոցի միացման հետևանքագիր սենսորները ինչպես նաև լազերային սեվագիրավոր սենսոր կարելի է նկարագրել փոքր օգնողների որպես, որոնք կող ստանում են և համոզվում, որ աշխատանքային մասնիկները մնում են իրենց տեղերում վիդոցի ժամանակ: Նրանք [ամենանոր գործիքները] հետևում են, որտեղ են մասնիկները, և օգնում են աշխատողներին գիտել, որ արդյոք ամենինքն սեղմում է լինել, օգտագործելով բարձրատեխնոլոգիայի մեքենագետական ուսուցում: Դա նման է նույնիսկ ընկերի ունենալու, ով կող ստանում է ձեզ աշխատելու ժամանակ, ասելով, որ արդյոք սխալ եք, կամ ոչ:
MINYUE համացանցի միացման հետազոտության սենսորների օգտագործումը և սենսոր գծի հետևանքի համար արդյունքներում ունի շատ գումարելի հատկություններ: Մեծ գումարելի է, որ այս վերջին տեսակի սենսորները օգնում են աշխատողներին կրկին ստուգել, որ նրանք ճիշտ են ժողովուրդ միացնում, ինչ երկարաժամկետում խուսափում է ժամանակի և գումարի: Հավասարաչափ միացնելով բանալիքները նվազում է կրկնակի աշխատանքի հնարավորությունը, որը կարող է դառնալ շատ թանգարան: Այս սենսորները նաև համոզվում են, որ համարձակված օբյեկտը աمنացն է և ուժեղ է: Սա icularly կրիտիկալ է այն տարածքում, որտեղ վերջնական արդյունքները պետք է լինեն ուժեղ և վստահելիորեն, ինչպես ինչ կառուցումներում կամ անգամ արդյունաբերության մեքանիզմներում:

Welding joint tracking sensors ինչպես նաև MINYUE ավտոմատ հաղորդացման սենսորը օգնում են մարդկանց աշխատել ավելի արագ և ճշգրիտ. Նրանք համոզված են, որ համարձակները ենթադրված դրույթում են ամբողջ համարձակման գործընթացի ընթացքում: Սա թույլ է տալիս աշխատողներին ավելի արագ կատարել իրենց աշխատանքը, քանի որ նրանք չեն պետք ունենալ համարձակների տեղափոխության կամ սահքի մասին: Ավելի ուշ, այս սենսորները համոզված են, որ համարձակները ճիշտ տեղադրված են և ունեն ճիշտ ձև: Դա անհրաժեշտ է, քանի որ համոզված է, որ վերջնական արտադրանքը ուժուն և անվտանգ է օգտագործման համար: Օրինակ՝ ճիշտ համարձակները դրանք միացնում են ճիշտ ձևով, ինչ պարhindում է հաջորդող առաջացուցակների կամ պակասումների հասկացությունը:
Ծրագրային սխալների հայտնաբերում արդյունավետություններում՝ համարձակման համարձակների հետևանքավորումից սենսորների օգտագործմամբ և սենսորներ գործարկող համակարգի հետ հետևում են այս սենսորները շատ կարևոր են այն պահի վրա, որպեսզի UFACTUR-ը համոզվի, որ նրա արտադրանքները լավ են և անվտանգ են մարդկանց համար։ Նրանք օգնում են նշել սխալները շուտ, քան որոշակի դժվար խնդիրներ դառնան, այնպես որ խուսափում են ժամանակի և գումարի։ Երբ աշխատակիցները կարող են նշել խնդիրները շարունակության սկզբում, նրանք կարող են լուծել դրանք արագ։ Կազմակերպությունները կարող են համոզվել, որ իրենց արտադրանքների որակը ամենաբարձր է և դրանք պատրաստ են վաճառվել գնորդներին՝ օգտագործելով այս սենսորները։

미래에는 용접 접합 추적 센서는 여전히 발전할 것이며 근로자와 공장 모두에게 더욱 가치 있는 것으로 평가될 것입니다. 현재 그들은 더 많은 일, 그리고 이전보다 더 빠르고 나은 일을 수행할 수 있는 새로운 센서를 개발하는 과정에 있습니다. 이는 근로자가 작업을 더욱 잘 수행할 수 있음을 의미하며, 만드는 모든 것이 완벽하다는 것을 보장할 확률이 더 높아집니다. 우리는 새로운 용접 접합 추적 센서의 미래에 매우 희망적이며 그것들이 무엇을 더 가져올지 기다릴 수 없습니다.
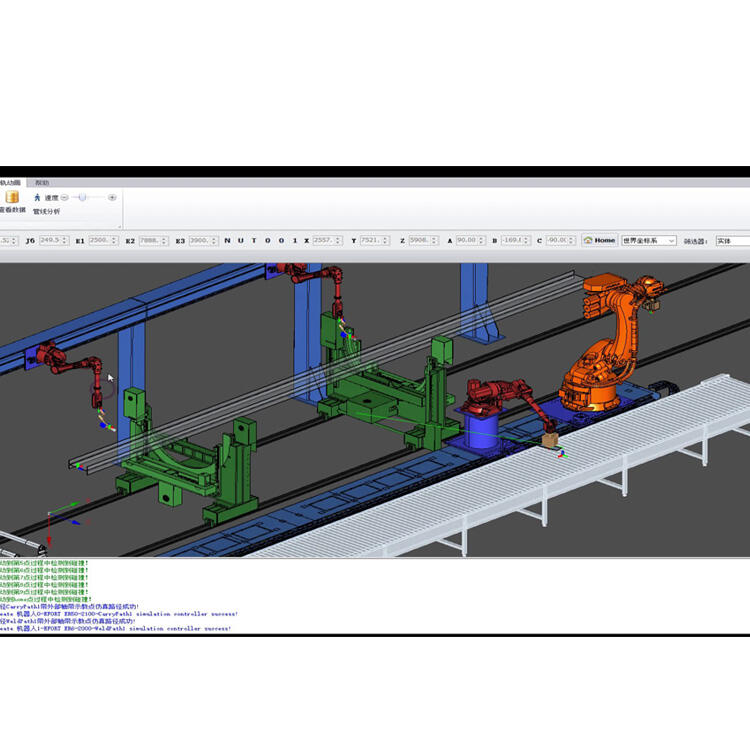
Օգտագործում է գտնելու և հետևելու ֆունկցիան, սկանավորելով վիճbum հատվածը, հաստատելով վիճbum հատվածի դիրքը և տեղեկատվությունը, որպեսզի حيحուղանակենք վիճbum դիրքը միջև 3D թվային մոդելային գծագրում և իրական աշխատանքային մասին, լուծելով վիճbum սխալների պատճառով մուտքային նյութերի սխալների և ջերմային դեֆորմացիայի պատճառով։
Արագ, ճշգրիտ, լինելով անծրագրային, բարձր արդյունավետությամբ և բարձր ճշգրտությամբ։ Դա լուծում է pä դարձնում է ավելի հեշտ այն բարդ ուսուցման գործընթացը, որը հանդիսանում է تقليստական ռոբոտների համար, ավելացնելով ուսուցման գործընթացի կանգ ժամանակը։
Beijing Minyue Technology Co.,LTD, որը համարվում է աշխարհի նախկին գեղատեսական տехնոլոգիայի կազմակերպությունը՝ արդյոք ինդուստրիալ ռոբոտների ոչ տարածաշրջանային ինտելեկտուալ կիրառման ոլորտում։ Մենք մասնագետ ենք առանց ծրագրավորման սեփական ինտելեկտուալ UFACTURING-ի վրա, օգտագործելով մեր սեփական արտադրած RobotSmart - Ինտելեկտուալ 抉cision Making System, SmartVision - Binocular Structured Light Vision System և SmartEye - Laser Vision Seam Tracking System։ Առաջարկում ենք նոր գերասենյակային ինտելեկտուալ ռոբոտային համեմատում և ստիրում լուծումներ։
Առաջարկում է հզոր վիճակագրական ռոբոտ, որը ենթադրում է առաջի բեռնում, կողմից բեռնում, փոխադարձ բեռնում, գանտրի մուտք, բանավեճ տրայեկտորիայի պլանավորում մի քանի ռոբոտների համար, մի քանի արտաքին առանցքների և դիրքաշրջի համատեղումների: Հասնում է ռոբոտի շարժման միմաստիկական մոդելավորման, հարթադիրքի հայտնաբերում, միակության հանգումից խուսափումին և առանցքի սահմանների հայտնաբերում։
 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK







