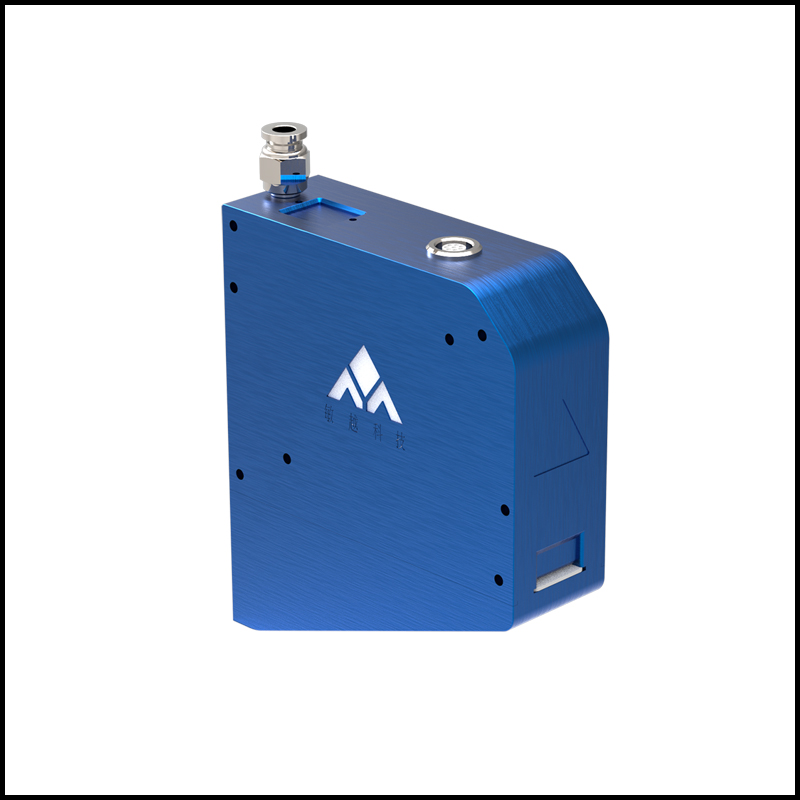
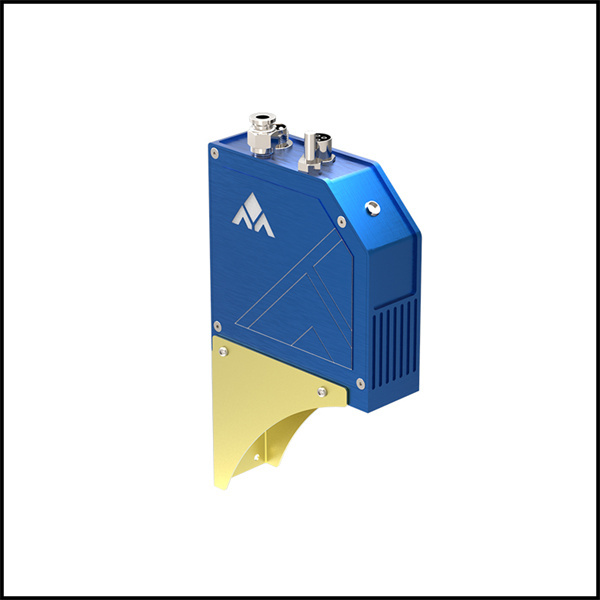
Դուրս են գալիս շատ գործիքներ ռոբոտական հաղորդման և խոչի հետևման սենսորները՝ մինչև այսօր ամենակարևորներից մեկը: Այս MINYUE լազերային սեվագիրավոր սենսոր թույլ է տալիս ռոբոտներին հետևել խոչին, երկու մետաղապարկերի միջև գտնվող միացման վայրկյանը: Եթե դուք ճիշտ հետևում եք այս խոչին, դուք կստանաք շատ լավ հաղորդում կամ միացում, որտեղ մետաղապարկերն են միացնում: Խոչի հետևման սենսորները օգտագործվում են ռոբոտների համար, քանի որ այս սենսորները թույլ են տալիս ռոբոտներին ավելի ճշգրիտ և արդյունավետ հաղորդել, և հաճախ օգտագործվում են շատ գործակալություններում:
Խոչի հետևման սենսորները կարևոր են շատ կարևոր պատճառների պատճառով, որոնցից մեկը՝ սենսորները պահում են ռոբոտները հաղորդման գործընթացի ժամանակ: Եթե ռոբոտը աշխատում է մետաղի մասի հետ, շատ կարևոր է, որ ռոբոտը ճշգրիտ հետևի խոչին: Եթե ռոբոտը սխալ դիրքում է, այն կարող է ստանալ թույլ հաղորդում կամ արդյունքում ոչ մի հաղորդում: Խոչի հետևման սենսորները պարունակում են մասնավոր տեխնոլոգիա, որը հաղորդում է խոչին լավ, և ուղղում է հաղորդումը ճիշտ տեղին: Հաղորդման գործընթացի հասարակ և հաջող պահպանում:
Երբ օգնում են ռոբոտներին ճանապարհը ճշգրիտ հետևել, ստիցքային սենսորները նաև թողնում են ճշգրիտ վարդելու համար: Դրանք այն անում են՝ պտտելով վարդելու բարձրությունը, որը հայտնի է որպես գործիչ, որը الذوبان մետաղը կապում է միասին, իսկ ռոբոտը աշխատում է: Այսպիսով, még ha մետաղային մասնավորությունները չեն լինել ճշգրիտ ուղղանկյուն, կամ ունեն շատ անհարմարություններ, սենսորները կարող են հայտնաբերել այդ փոփոխությունները: Երբ ինչ-որ բան դարձնում է սխալ, սենսորները միանգամ կարող են փոխել վարդելու գործընթացը: Սա արդյունավետություն է բարելավում և համապատասխանում է շատ գործումներին, ինչպես նաև այն դեպքերում, երբ պահանջվում են անկախ և վստահելի համացանցներ։
Ավելին, շուրջագծի հետևման սենսորները արագացնում են կպման գործընթացը և դա դարձնում է այն ավելի արդյունավետ: Ռոբոտները կարող են ավելի արդյունավետ աշխատել՝ ավտոմատացնելով շուրջագծի հետևման գործընթացը: Հատուկ կարևորություն ունի այն բոլոր արդյունքների համար, որտեղ շատ մետաղական մասնակիցներ պետք է կպվեն կարճ ժամանակի ընթացքում, օրինակ, մինչև մարդատունների կամ օդանավերանոցների մարագին: Շուրջագծի հետևման սենսորները օգնում են ռոբոտներին ավելի քիչ ժամանակում կատարել իրենց աշխատանքը, թույլ տալիս ընկերություններին հասնելուն իրենց արտադրանքային թիվը:

Շուրջագծի հետևման սենսորների տեխնոլոգիայի զարգացումները տվել են նրանց ավելի լավ օգտագործելիությունը դրանց նախորդներից: Նոր սենսորները կարող են անատեսականությունները հայտնաբերել ավելի արագ: Նրանք նաև կարող են աշխատել տարբեր միջավայրերում, ինչ նշանակում է, որ դրանք կարող են օգտագործվել ցածր լուսավորության պայմաններում կամ այնպիսի փայլերի վրա, որոնք դժվար է տեսնել: MINYUE հանգիստի հետ հետևիչ բազմակի օգտագործելիությունը դարձնում է դրանք ideal տարբեր կպման աշխատանքների համար:

Շուրջագծի հետևման սենսորները հայտնի են արդյունավետության պատճառով՝ գնահատելիս դրանց շատ առավելությունները: MINYUE երկուական կառուցվածքային լույսի տեսական սենսորներ բարձրացրեք որոշակիությունը և ավելացրեք 悍 接-ի արագությունը, ինչպես նաեւ նվազեցրեք սխալները և համապատասխանաբար նվազեցրեք կրկնօրինակությունը: Սա կարևոր է, քանի որ սխալները حيححيحorrect-ելիս կարող են դնվել ժամանակատար և թանգարանական: Հետո, ընդհանուրապես՝ կազմակերպությունները, որոնք կախված են ռոբոտական 悍 接-ի վրա, կարող են կտրել ժամանակը և արժեքը, դա դարձնում է դրանք ավելի արդյունավետ գործողություններում՝ սեփական սենսորների օգտագործմամբ:
Երբ ընտրում եք ճիշտ սենսորի տիպ ձեր 悍 接 կիրառման համար, պետք է դիտարկեք ձեր գործնականության պահանջները: Երբ գործնականությունների միջև տարբեր մետաղների տիպերի մասին կամ mooie 即 տարբեր 悍 接 գործընթացների մասին, MINYUE ռոբոտիկայում տարբեր տեսակի սենսորներ կարող է ավելի լավ աշխատել, քան այլը: Օրինակ, մի քանի սենսորներ իդեալ են բարդ մետաղների համար, իսկ այլը կարող են տարանցել հաստ մետաղներին: MINYUE-ն մասնագետություն է ստանում առավելությունների տրամադրության մեջ՝ առաջարկելով բարդ լուծումների լայն տարածք՝ համապատասխանությունով իրենց հաճախորդների միակ պահանջներին: Բազմաթիվ տարբերակների առաջարկումով՝ կազմակերպությունները կարող են գտնել իրենց հատուկ 悍 接 կիրառման համար իդեալ սենսորը:
Արագ, ճշգրիտ, լինելով անծրագրային, բարձր արդյունավետությամբ և բարձր ճշգրտությամբ։ Դա լուծում է pä դարձնում է ավելի հեշտ այն բարդ ուսուցման գործընթացը, որը հանդիսանում է تقليստական ռոբոտների համար, ավելացնելով ուսուցման գործընթացի կանգ ժամանակը։
Օգտագործում է գտնելու և հետևելու ֆունկցիան, սկանավորելով վիճbum հատվածը, հաստատելով վիճbum հատվածի դիրքը և տեղեկատվությունը, որպեսզի حيحուղանակենք վիճbum դիրքը միջև 3D թվային մոդելային գծագրում և իրական աշխատանքային մասին, լուծելով վիճbum սխալների պատճառով մուտքային նյութերի սխալների և ջերմային դեֆորմացիայի պատճառով։
Առաջարկում է հզոր վիճակագրական ռոբոտ, որը ենթադրում է առաջի բեռնում, կողմից բեռնում, փոխադարձ բեռնում, գանտրի մուտք, բանավեճ տրայեկտորիայի պլանավորում մի քանի ռոբոտների համար, մի քանի արտաքին առանցքների և դիրքաշրջի համատեղումների: Հասնում է ռոբոտի շարժման միմաստիկական մոդելավորման, հարթադիրքի հայտնաբերում, միակության հանգումից խուսափումին և առանցքի սահմանների հայտնաբերում։
Beijing Minyue Technology Co.,LTD, որը համարվում է աշխարհի նախկին գեղատեսական տехնոլոգիայի կազմակերպությունը՝ արդյոք ինդուստրիալ ռոբոտների ոչ տարածաշրջանային ինտելեկտուալ կիրառման ոլորտում։ Մենք մասնագետ ենք առանց ծրագրավորման սեփական ինտելեկտուալ UFACTURING-ի վրա, օգտագործելով մեր սեփական արտադրած RobotSmart - Ինտելեկտուալ 抉cision Making System, SmartVision - Binocular Structured Light Vision System և SmartEye - Laser Vision Seam Tracking System։ Առաջարկում ենք նոր գերասենյակային ինտելեկտուալ ռոբոտային համեմատում և ստիրում լուծումներ։
 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK