Bet grįžtant prie struktūrizuotų šviesos jutiklių, šie maži įrenginiai naudojami siekiant gauti vaizdus tokiais būdais, kurie supaprastina aplinkos supratimą. Jie leidžia mums matyti objektus taip, kaip mes galbūt negalėtume pamatyti jų savo paprastais akimis. Taigi pažvelkime giliau į struktūrizuotų šviesos jutiklių veikimą, kaip jie veikia ir kaip jie gali būti naudingi visiems.
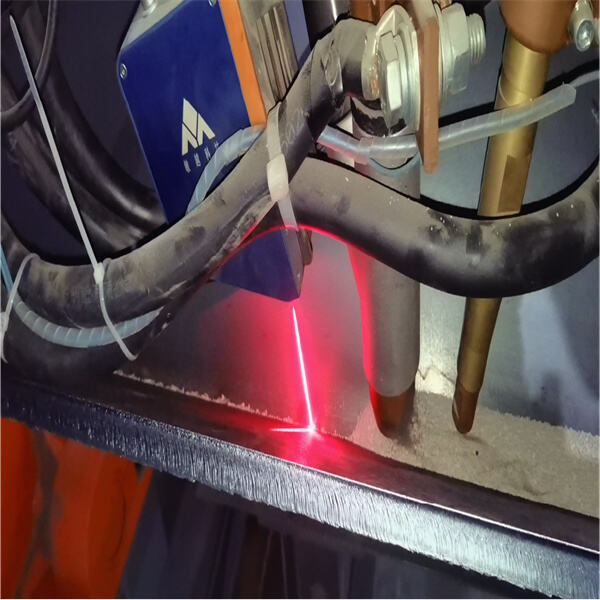
Struktūrizuoto šviesos jutiklio veikimas: Struktūrizuoti šviesos jutikliai projekcijuojamas unikalų šviesos šabloną ant objekto. Kitais žodžiais, įsivaizduokite, kad linkite lėktuvę su specialiu dizainu, tarkime taškais ar juostomis, ant paviršiaus. Šis šviesos šablonas yra svarbus todėl, kad jis leidžia jutikliui sukurti detalų 3D modelį objekto. Objekto formos ir tekstūros paveikia tai, kaip šviesa veikia, kai jis atspindžiasi nuo jo paviršiaus. lazerinio spindulio jutiklis aptinka šias pokyčius šviesos lauke. Duomenys kūra realistišką 3D vaizdą objekto, leidžiant iškaupti dešimtis kampos, kaip tai daro veido pripažinimo technologijos aplink objektą, panašiai, kaip žmogus einantis aplink statuą, kad ištirtų visas jos puses.
Struktūruotas laserinis šviesos jutiklis yra būtini sudaryti aiškius ir tikslius 3D vaizdus iš objektų. Šie jutikliai leidžia mokslininkams ir inžineriams gauti tikslius matavimus kelių objekto charakteristikų, pvz., jo formos, dydžio ir kaip atrodo paviršius. Pavyzdžiui, gamindami žaislus ar automobilius, yra svarbu turėti tinkamą dydį ir formą, todėl taip svarbu turėti tinkamas priemones, kad patikrinti šias dalykus. Jūs sužinojote apie duomenis, kai treniruojatės patikrinti tokias darbo vietas fabrikose, pvz., užduotį Wok to Walk stovykloje, kad būtų įsitikinę, jog tai gamina teisingai ir saugiai.
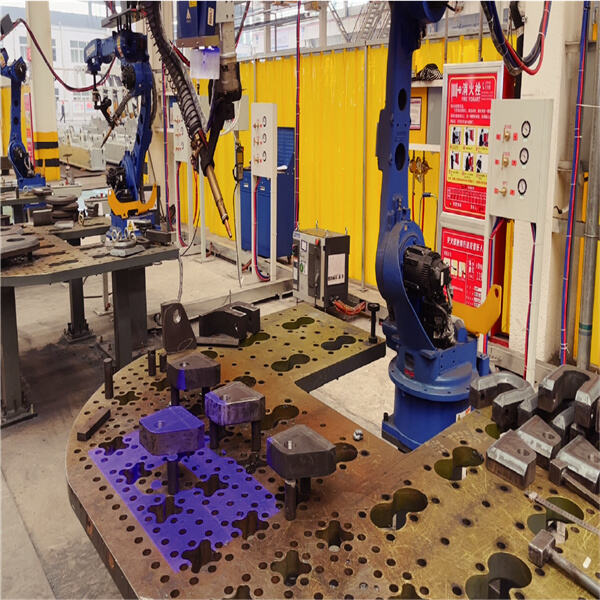
Struktūrizuoto šviesos jutikliai žaidžia svarbų vaidmenį fabrikose, nes jie leidžia robotams ir mašinoms „matyti“ ir interpretuoti aplinką. Pamatykite, kaip žmonės naudoja akis stebėti savo veiksmus. Robotams reikia to paties gebėjimo, kad galėtų veikti efektyviai. Tokios sistemos, kurios naudoja struktūrizuotą šviesą, lazerinis artumos jutiklis , padeda gamytojams padaryti gamybos procesus tiksliausius ir efektyvesnius. Tai taip pat reiškia, kad jie gali pateikti produktus greičiau ir su mažesniais klaidomis. Ši technologija žaidžia labai kritinį vaidmenį užtikrinant, kad produktai yra pagaminti su nuolatine aukšta kokybe, kuri tenkina klientus.
Per pastaruosius kelis metus struktūrinio šviesos jutiklių technologijoje buvo padaryti dideli pažangos žingsniai, kurie pakeitė tai, kaip matuojame daiktus. Šie nauji jutikliai yra mažesni, greitesni ir dabar tiksliausi nei kada nors anksčiau. Tai leidžia mokslininkams ir inžineriams atlikti geresnius matavimus ir sukurti labai išsamias 3D objektų modelius. Pavyzdžiui, mažas jutiklis dabar gali matyti detalęs, kurios ankstesnis buvo sunku vizualizuoti, o tai padeda gerinti dizaines ir produktus.
Dirbant kartu su dirbtiniu intelektru (DI), žmonės gali atlikti darbus saugesniu būdu, nes labiausiai kenksmingi uždaviniai gali būti perduodami robotams. Kai kurie robotai, pavyzdžiui, padeda tyrinėti vietas, į kurias žmonėms yra sunku patekti, tokias kaip giliai vandenynai ar kosmosas. Struktūrinio šviesos jutikliai leidžia robotams rasti ir sąveikauti su aplinkinių jų objektų. Su jais robotai gali „matyti“ objektus aiškiau. didelio greičio lazerinis jutiklis taigi jie nesuksia į daiktus, o tai jų padaro saugesnius ir geresnėmis jų pareigose. Tai yra būtina, kad robotams galėtų dirbti skirtinguose aplinkos sąlygose.
Beijing Minyue Technology Co.,LTD, kaip pasaulio lydere besijaučiančio aukštos technologijos įmonės pramoninių robotų neįmokomosios inteligentaus taikymo srityje. Specializuojamės flexibiliojo inteligento gamyboje su mūsų savarankiškai sukurtu RobotSmart - Inteligentinis sprendimų priėmimo sistema, SmartVision - Dviejų akinių struktūrizuoto šviesos vizija sistema, ir SmartEye - Laserinė vizija jūros sekimo sistema. Teikia naujausią kartą inteligentinių robotų suvilkimo ir pjovimo sprendimus.
Naudojant funkcijas, skirtas rasti ir sekti, skenuojant šovinius sutriktimus, patvirtinti šovinių sutriktimų vietą ir informaciją, ištaisyti šovinių sutriktimų vietą tarp 3D skaitmeninio modelio brėžinio ir faktinio darbo gabalo, bei išspręsti problemą dėl nelygiaverčių šovių dėl įvesties medžiagų klaidų ir šiluminės deformacijos.
Siūloma galinga varomųjų robotų priešinė įkrovos, kraštine įkrovos, atvirkštinės įkrovos, jumties montavimo, gebančių inteligentiniam kelio planavimui keliems robotams, keliems išoriniams aksiams ir pozicionieriams bendradarbiaujant. Galima realizuoti robotų judesio simuliaciją, sutrikimų aptikimą, vienatvičių išvengimą ir aksių ribų aptikimą.
Greita, tikslu, visiškai Be-Programavimo, aukšta efektyvumas ir aukšta tikslumas. Tai išspręsta trisčio mokymo proceso tradicinių robotų problema ir sumažina mokymosi proceso dėltoją.
 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK








