Šis patogus įrankis vadinamas laserinio trianguliacijos jutikliu ir jis esminiu būdu pagerina mašinų ir robotų gebėjimus. Taigi, šiame straipsnyje pamatysime, ką yra šie jutikliai, kaip jie veikia ir kokia jų vaidmenis skirtingose darbo srityse ir pramonėje. Laserinis trianguliacijos jutiklis naudoja lazerius, kad nustatytų atstumą iki objekto. Tarkime, kad jutiklis siunčia lazerio šviesos spindulį link objekto. Medžiaga apima objektą ir atspindi lazerio spindulį atgal į jutiklį. robotinę laserinę suvienodinimo mašiną tada jis matuoja laiką, kurį lazeris užima kelionę iki objekto ir atgal. Tai leidžia jutikliui apskaičiuoti atstumą iki objekto. Ši informacija yra ypač svarbi, nes leidžia robotams ir mašinoms nustatyti objektų vietą ir suprasti, kaip teisingai su jais sąveikauti.
Kokie yra laserių trikampio matavimo jutiklių veiksmai ar darbai, padedantys lengviau pasiekti sėkmę gamybos procesuose? Vienas iš pagrindinių būdų: padarant matavimus tikslesnius. Kai automatizuotas laserinis suvienodinimas stovai gamina produktus, jie turi būti ypač tikslūs dydžių ir formų požiūriu. Laserių trikampio matavimo jutikliai padeda užtikrinti, kad viskas būtų tikslu, todėl produktai gaunami teisingai. Toks tikslumas gali užtaisyti laiko ir pinigų mažinant klaidas ir užtikrinant, kad viskas būtų atlikta tinkamai nuo pat pradžios.
Lazerinė trikampio schemos jutikliai taip pat yra gausiai naudingi robotikos srityje. Mes naudojame jutiklius robotikoje, kad pagerintume roboto situacinę sąmoningumą. Ši gebėjimo pakenki padidina galimybes robotams geriau orientuotis aplinkose ir sąveikoti su daiktus. Tarkime, jei robotas yra naudojamas sandelyje, jis gali naudoti lazerinius trikampio schemos jutiklius, kad išvengtų susidūrimų ir pakopų su paketu, nenaudojant lazerinis suveldymo robotinė sistema . Tada, vykdant įvairias užduotis, tai daro robotus veiksmingesnius ir tiksliausius.
Gamybos kokybės kontrolė yra svarbi dalis gamyboje, kurios tikslas yra užtikrinti, kad produktai būtų pagaminti teisingai ir atitinka tam tikrą standartą. Kokybės kontrolės procese nustatant, ar visi produktai yra pagaminti tinkama būdu, lazerinės trikampio schemos jutikliai gali būti efektyviuoju sprendimu. Pavyzdžiui, šie lazerinio spindulio jutiklis gali matuoti produkto mastelį ir užtikrinti, kad jis būtų tinkamo dydžio. Tai leidžia iš anksto aptikti klaidas, kurias galima pataisyti, kol produktas dar nėra baigtas. Kokybės kontrolės lazerių trianguliacijos jutikliai prevencijuojant defektus ir užtikrinant, kad tik teisingi produktai būtų siunčiami vartotojams.
Lazerių trianguliacijos technologijos ateitis Kol technologija tobulėja, šie lazerinis artumos jutiklis bus dar labiau esminiai automatyzoje ir daugelyje kitų sritybių. Atsiranda nauji, įtempti būdai jais naudotis, dėl kurių mašinos ir robotai taps protingesni ir efektyvesni. Pavyzdžiui, ateities savarankiškai važiuojančios automobiliai gali naudoti lazerių trianguliacijos jutiklius, kad aptiktų ir išvengtų kliūčių. Jie taip pat gali būti naudojami medicinos prietaisais, padedant gydytojams atlikti operacijas tiksliau ir saugesniais būdais. Šių jutiklių programų praktinis taikymas yra virtualiai begalinis!
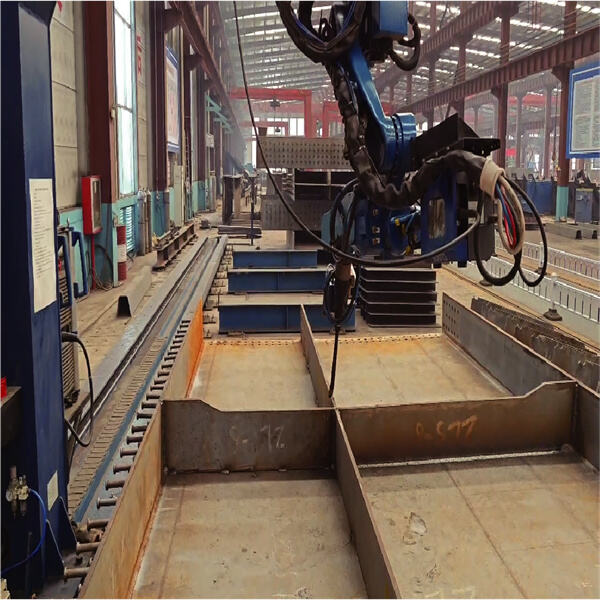
Beijing Minyue Technology Co.,LTD, kaip pasaulio lydere besijaučiančio aukštos technologijos įmonės pramoninių robotų neįmokomosios inteligentaus taikymo srityje. Specializuojamės flexibiliojo inteligento gamyboje su mūsų savarankiškai sukurtu RobotSmart - Inteligentinis sprendimų priėmimo sistema, SmartVision - Dviejų akinių struktūrizuoto šviesos vizija sistema, ir SmartEye - Laserinė vizija jūros sekimo sistema. Teikia naujausią kartą inteligentinių robotų suvilkimo ir pjovimo sprendimus.
Siūloma galinga varomųjų robotų priešinė įkrovos, kraštine įkrovos, atvirkštinės įkrovos, jumties montavimo, gebančių inteligentiniam kelio planavimui keliems robotams, keliems išoriniams aksiams ir pozicionieriams bendradarbiaujant. Galima realizuoti robotų judesio simuliaciją, sutrikimų aptikimą, vienatvičių išvengimą ir aksių ribų aptikimą.
Greita, tikslu, visiškai Be-Programavimo, aukšta efektyvumas ir aukšta tikslumas. Tai išspręsta trisčio mokymo proceso tradicinių robotų problema ir sumažina mokymosi proceso dėltoją.
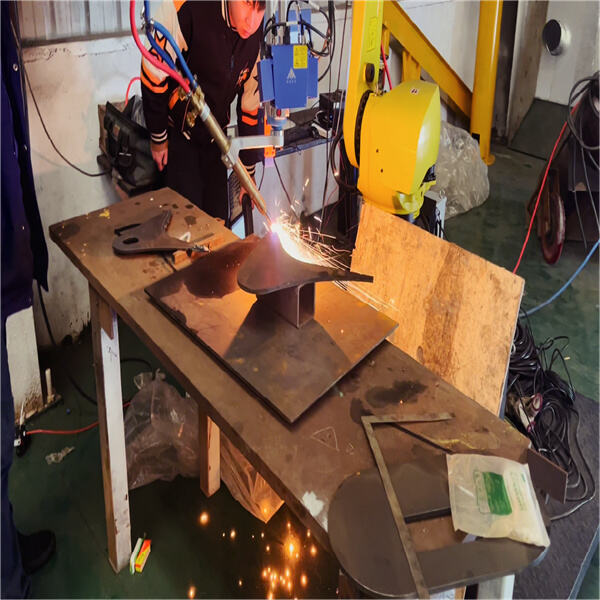
Naudojant funkcijas, skirtas rasti ir sekti, skenuojant šovinius sutriktimus, patvirtinti šovinių sutriktimų vietą ir informaciją, ištaisyti šovinių sutriktimų vietą tarp 3D skaitmeninio modelio brėžinio ir faktinio darbo gabalo, bei išspręsti problemą dėl nelygiaverčių šovių dėl įvesties medžiagų klaidų ir šiluminės deformacijos.
 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK








