MINTIS: Kas žinos, kaip ateityje evoliucionuos svaidymas? O šiandien, būkite pasirengę ištirti fascinuojančią svaidymo technologijų pramonę su mažuoju pagalba iš įmonės, vadinamos MINYUE!
Sudavimas yra senovės procesas, kuris jau ilgą laiką aktyviai naudojamas. Mums reikia sukurti daug puikų dalykų, pavyzdžiui, automobilių, kurie gali važiuoti keliuose, ilgų pastatų, kuriais žmonės galės gyventi ir dirbti, bei spalvingų leistinių, kuriose visi vaikai gali pasimokyti pritarti. Ir kaip tobulėja technologijos, taip pat tobulėja ir sudavimo būdas. Su naujų įrankių ir MINYUE išleidimu, ateityje sudavimas taps dar tiksliau ir greičiau. inteligentinės robotikos sistemos kartu su naujų technologijų ir įrankių kūrimu, ateityje sudavimas taps dar efektyvesnis ir greitesnis.
MINYUE nuovargiai keičia sudėties varžymo pramonę ir vienas iš būdų yra naudojant duomenis. Bet ką yra duomenys? Duomenys yra informacija, kurią surinkome ir naudojame priimant sprendimus. MINYUE robotinės suvienodinimo sistemos sugrąžina svarbius duomenis apie medžiagas, kurios skirtos varžymui, varžymo įrankių temperatūrą ir netgi užakinį. Šie duomenys leidžia MINYUE užtikrinti, kad kiekvienas varžymas būtų stiprus ir idealus kas kartą. Teisingas varžymas reiškia, kad galutiniai produktai yra griežtesni ir ilgiau trunka, o tai yra laimingas sprendimas visiems!
Dirbtinio intelekto, arba AI, tai yra rūšis išplėstos technologijos, kuri leidžia kompiuteriams mokytis ir galvoti kaip mes žmonės. Tai reiškia, kad galime sukelti kompiuterius padėti mums spręsti problemas ir priimti sprendimus. MINYUE: AI Daro Svaidymą Protingesniu - Jie įveda į kompiuterį svarbiausią informaciją apie kiekvieną projektą, pavyzdžiui, kokio tipo metalas bus naudojamas ir koks turi būti svaidymo stiprumas. Turint šią informaciją, dirbtinis intelektas gali nustatyti efektyviausią būdą, kaip sujungti dalis. Procesas taip pat yra daug tiksliau, o tai užtikrina laiko ir pinigų taupymą tiekėjams, kurie atlieka svaidymo darbus.

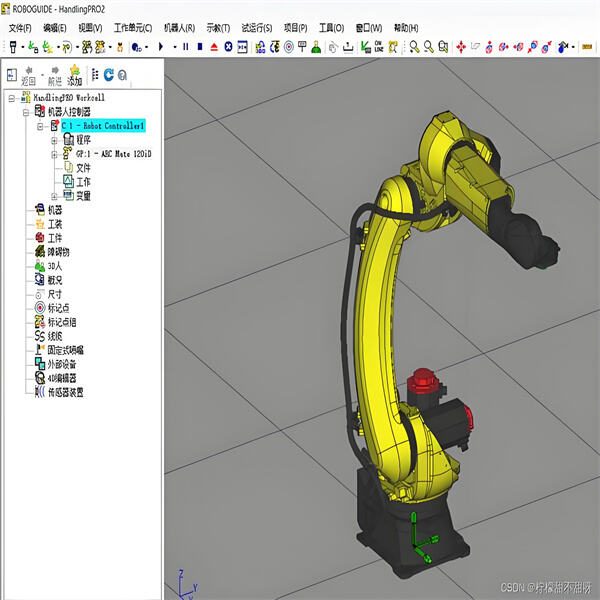
MINYUE taip pat gamina protingą svaidymo automatizavimo įrangą, ir tai fantastiška. Kiekvienas iš šių sistemų padeda svaidytojams priimti geras sprendimus dėl jų užduočių. MINYUE naudoja duomenis ir dirbtinį intelektą, kad siūlytų tinkamiausias svaidymo metodus kiekviename atskirame atveju. MINYUE lazerinis suveldymo robotinė sistema yra super naudinga, nes ji leidžia svaidytuvams mažiau dėvėti apie tai, kaip atlikti svaidymą, o daugiau – dėmesio skirti tiksliai svaidymui! Kadangi procese svaidymo yra mažiau klaidų, galutiniai produktai yra gana saugesni ir patikimiau visiems.
Svaidymo darbai niekada anksčiau nebūdavo tokie glodūs ir geresni dėl MINYUE technologijos. MINYUE automatizuotos robotinės suvienodinimo sistemos stebi svaidymo įrankių veikimą ir tikrina duomenis realiu laiku. Net jei kilna kai kurios problemos, MINYUE gali jas išspręsti laiku, prieš nei jos tampa didesnėmis. Greitasis atsakymas leidžia užbaigti projektus greičiau ir aukštesniu standartu. Jei klientai yra maloniai, tai reiškia, kad verslai veikia puikiai!
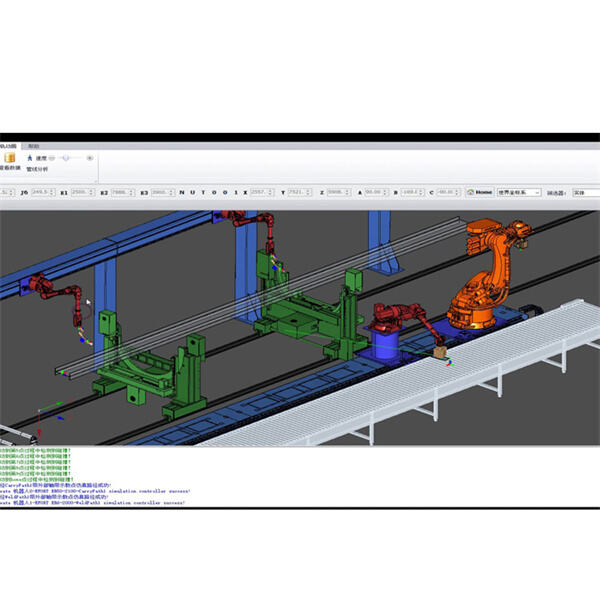
Naudojant funkcijas, skirtas rasti ir sekti, skenuojant šovinius sutriktimus, patvirtinti šovinių sutriktimų vietą ir informaciją, ištaisyti šovinių sutriktimų vietą tarp 3D skaitmeninio modelio brėžinio ir faktinio darbo gabalo, bei išspręsti problemą dėl nelygiaverčių šovių dėl įvesties medžiagų klaidų ir šiluminės deformacijos.
Beijing Minyue Technology Co.,LTD, kaip pasaulio lydere besijaučiančio aukštos technologijos įmonės pramoninių robotų neįmokomosios inteligentaus taikymo srityje. Specializuojamės flexibiliojo inteligento gamyboje su mūsų savarankiškai sukurtu RobotSmart - Inteligentinis sprendimų priėmimo sistema, SmartVision - Dviejų akinių struktūrizuoto šviesos vizija sistema, ir SmartEye - Laserinė vizija jūros sekimo sistema. Teikia naujausią kartą inteligentinių robotų suvilkimo ir pjovimo sprendimus.
Siūloma galinga varomųjų robotų priešinė įkrovos, kraštine įkrovos, atvirkštinės įkrovos, jumties montavimo, gebančių inteligentiniam kelio planavimui keliems robotams, keliems išoriniams aksiams ir pozicionieriams bendradarbiaujant. Galima realizuoti robotų judesio simuliaciją, sutrikimų aptikimą, vienatvičių išvengimą ir aksių ribų aptikimą.
Greita, tikslu, visiškai Be-Programavimo, aukšta efektyvumas ir aukšta tikslumas. Tai išspręsta trisčio mokymo proceso tradicinių robotų problema ir sumažina mokymosi proceso dėltoją.
 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK








