Ლაზერული ტრიანგულაცია არის საშუალება, რომელიც ძალიან საინტერესოა და გამოიყენება მასთან, რომ სწორად განსაზღვროთ მანძილები. ის გამოიყენება ლაზერებს, რომ განსაზღვროს, რამდენად მანძილზე მდებარეობს რამე ჩვენგანთვის. ლაზერები არის განსხვავებული ტიპის სინათლე, რომელიც შეიძლება გადაიტანოს გრძელი მანძილი. ვისწავლოთ მეტი ლაზერული ტრიანგულაციის შესახებ და როგორ მუშაობს MINYUE-თი.
Მაგრამ თქვენ ანალიზირებთ მანძილებს ლაზერული საფარის საშუალებით, რაც არის 3d ლაზრის ტრიანგულაცია . ის ამატებს ლაზერულ სინათლეს ადგილზე, შემდეგ გამოითვლებს, რამდენი დრო ასჭირება სინათლეს დაბრუნებისთვის წყაროში. რადგან ლაზერული სინათლე გამოიკუთვნის ადგილების ზედაპირებიდან, ის დაბრუნდება სენსორში. მათემატიკისა და სპეციალური ინსტრუმენტების გამოყენებით შეგვიძლია განვასაზღვროთ, რამდენად მანძილზე მდებარეობს ადგილი. ეს იнструმენტი გამოიყენება სხვადასხვა სამუშაო პროცესში, და იყენება ფაბრიკებში და რობოტების განვითარებაში.
MINYUE ლაზერული ტრიანგულაციის სენსორი არის ზომვის ტექნიკა, რომელიც დაყრდნობულია გეომეტრიულ და ფიზიკურ კონცეპციებზე, რათა სწორად ზომავინ მანძილები. როდესაც ლაზრის სხეული მიწვევს オბიექტს, შეიქმნება ტრიანგლი ლაზრს, აბიექტს და სენსორს შორის, რომელიც ნახევა სხეულის დაბრუნებას. ტრიანგლის კუთხეების და მანძილების ზომვით, სისტემა შეიძლება გამოთვალოს ზუსტი მანძილი აბიექტამდე.
Თქვენ ხართ განმარტებული სკანირების, მონაცემთა აღმოსავლეთა, მონაცემთა გადამუშავების და ა.შ. მისამართებით. მაღალი გარჩევას მომდევნოების გამოყენებით და განათლებული კომპიუტერული ალგორითმებით, MINYUE-ის ტექნოლოგია შეძლებს გამოსახატვას განსაკუთრებით ზუსტი მანძილის ზომისას. ასეთი დონის ზუსტება ძვირად არის საჭირო სამუშაოებისთვის, რომლებიც მოითხოვენ ზუსტი ზომები, მაგალითად, საჰაერო მაशინების ან მანქანების წარმოებაში.
Ლაზრის ტრიანგულაციის ტექნოლოგია გამოიყენება ქარხნის მთლიან დარბაზში რამდენიმე დავალებისა და გამოყენებისთვის. ერთ-ერთი მაგალითია პროდუქციის ხარისხის შემოწმება. ტრიანგულაციის სენსორი შეიძლება გამოიყენოს პროდუქტის ზომების ანალიზისთვის და პრობლემების ან დეფექტების განახლებისთვის. ეს ნიშნავს, რომ მუშაობელები შეძლებენ დაწერას, თუ რაღაც შექმნილია სწორად თუ არა.
Ლაზრის ტრიანგულაცია რობოტიკაში დახმარება მანქანებს მათი გარემოს გასაგებად და ადამიანთან ენგაჟმენტში განახლებისთვის. ეს ტექნოლოგია შესაძლებლობას გაძლევს რობოტებს მაგალითების გარეშე მოძრაობას და უსაფრთხოდ მუშაობას ადამიანთან ერთად. ამასთანავე, ლაზრის ტრიანგულაცია არის გარკვეული ტექნიკა 3D სკანერისთვის, რომელიც შესაძლებლობას გაძლევს შექმნას საგნების ძალიან ზუსტი ციფრული წარმოდგენა.
MINYUE მდებარეობს ლაზრის ტრიანგულაციის ტექნოლოგიის განვითარების წინააღმდეგ, განსაკუთრებით 3D სკანერისთვის. ჩვენი სისტემები შეძლებენ დაასახებინა დეტალური 3D სურათები საგნებისა, განსაკუთრებით ზუსტი და სწრაფი სიჩქარით. ეს ყველაზე გამოსადეგია რომელთანაც არქიტექტურა, არქეოლოგია, ენტერტეინმენტი, სადაც 3D მოდელები არის ძვირი ყველაფერისთვის, რადგან ეს არის საჭირო განსაზღვრავი და დიზაინი.
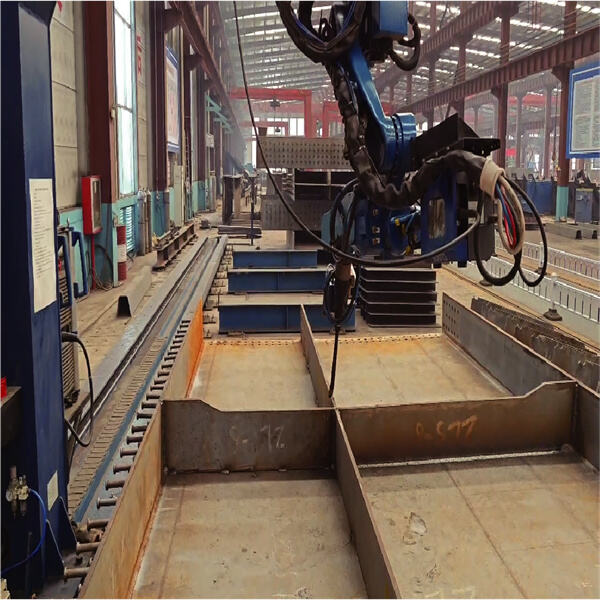
Გთავაზობთ ძალიან სიმძლავრი საკერძო რობოტის წინა ჩატვირთვა, გვერდიდან ჩატვირთვა, შებრუნებული ჩატვირთვა, განრიგი მაუნტინგი, ინტელექტუალური ტრაექტორიის გეგმა რამდენიმე რობოტისთვის, რამდენიმე გარე ღერძებისთვის და პოზიციონერისთვის საერთო მუშაობისთვის. რეალიზებს რობოტის მოძრაობის სიმულაციას, კოლიზიის გამოკვლევას, ერთობლივობის გარეშე და ღერძის ზღვარის გამოკვლევას.
Пекинს Minyue Техნოლოგია Co., LTD, როგორც მსოფლიო მიერ მובילი სამეცნიერო კომპანია ინდუსტრიული რობოტების გარემოში განათლების გარეშე ინტელექტუალური აპლიკაციები. ჩვენ განხილული ვართ წყვეტილი ინტელექტუალური შემუშავება ჩვენს თვით-განვითარებული RobotSmart - ინტელექტუალური გადაწყვეტილების სისტემა, SmartVision - ბინოკულარული სტრუქტურული სინათლე ვიზუალური სისტემა, და SmartEye - ლაზერული ვიზიუალური შემდეგი სისტემა. გთავაზობთ ახალი გენერაციის ინტელექტუალური რობოტული საკერძო და დაჭრივი ამოხსნები.
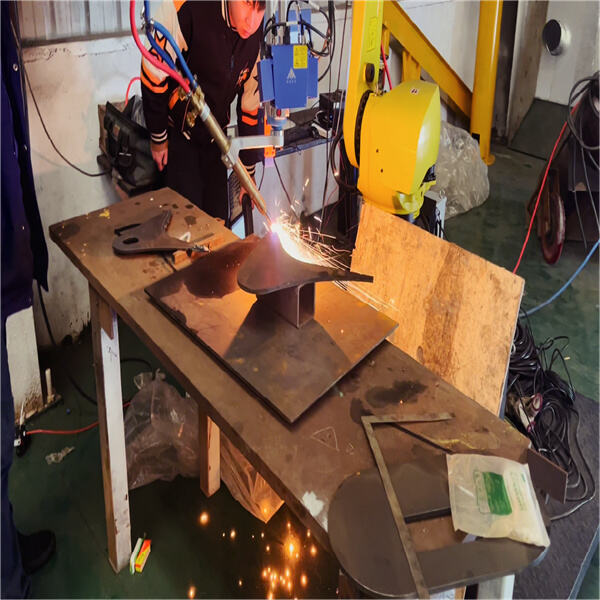
Გამოყენებით ფუნქციების ძებნასა და გადამოძრაობას, სკანირება სველის კრავის, დადასტურებს კრავის ადგილმდებარეობასა და ინფორმაციას, განახლებს სველის ადგილმდებარეობას 3D ციფრული მოდელის და რეალური ნაწილის შორის, ამოხსნის პრობლემას სველის გადახრის გამო შესაბამისი მასალების შეცდომებისა და თერმული დეფორმაციის გამო.
Სწრაფი, ზუსტი, მთლიანად პროგრამირების გარეშე, მაღალი ეფექტიურობა და ზუსტება. ის ამოხსნის تقليს რობოტების სირთულეად სწრაფ პროცესს და შენახავს სწრაფი პროცესის ჩათვლის დრო.
 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK








