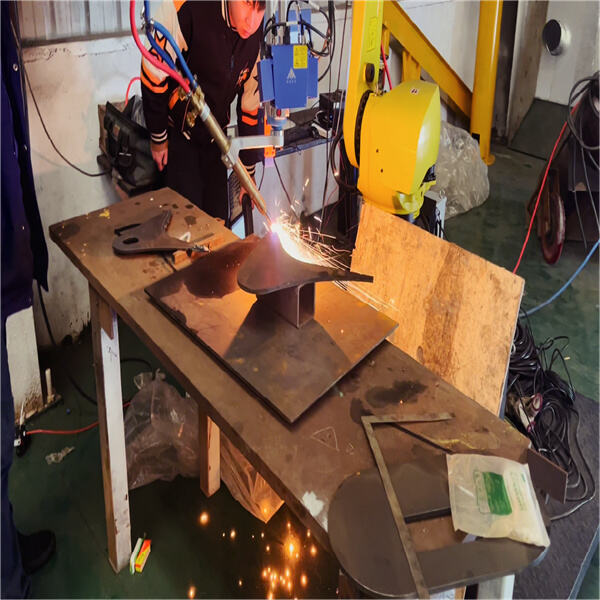
Ეს განსაკუთრებით საშუალება წარმოადგენს ლაზერულ ტრიანგულაციის სენსორს, რომელიც სამართლავით გაუმჯობეს მაशინებისა და რობოტების შესაძლებლობას. ამიტომ, ამ სტატიაში ჩვენ განვიხილავთ ეს სენსორებს, როგორ მუშაობენ და როგორი არის მათი როლი განსხვავებულ სამუშაოებში და ინდუსტრიაში. ლაზერული ტრიანგულაციის სენსორი იყენებს ლაზერებს სიდიდის განსაზღვრად საგანად. ვთქვათ, რომ სენსორი გამოგზავნის ლაზერულ სინათლეს საგანად. მასალა დაფარებულია საგანად და ლაზერული სინათლე დაბრუნდება სენსორში. სენსორი რობოტული ლაზრის საკრური მანქანა შემდეგ გამოითვლის ლაზერის გადასავლის დრო საგანამდე და უკვე უკვე. ეს შესაძლებლობა სენსორს განსაზღვრავს საგანის მდებარეობას. ეს ინფორმაცია საკმარისად გამოსადეგია, რადგან ეს აძლევს რობოტებს და მაशინებს შესაძლებლობას საგანების მდებარეობის განსაზღვრად და როგორც უნდა ინტერაქტირონ მათთვის.
Რა არის ლაზრის ტრიანგულაციის სენსორების მუშაობა ან ქმედება იმის გაკეთებაში, რომ გარკვეული სამუშაო დასაქმები, როგორიცაა წარმოება, წარმატებით განხორციელდეს? ერთ-ერთი ძირითადი გზა: ზომების ზუსტების გაუმჯობეს. როდესაც ლაზრის საერთიანებო ავტომაცია მაशინები წარმოადგენენ პროდუქტებს, მათ ძალიან ზუსტად უნდა იყოს ზომები და ფორმები. ლაზრის ტრიანგულაციის სენსორები დაგვეხმარებიან რათა ყველა იყოს ზუსტად არსებითი, რათა პროდუქტები წარმატებით გამოვიდეს. ეს ზუსტება შეიძლება დაზოგოს დრო და ფინანსები, შეცდომების შემცირებით და დარწმუნებით, რომ ყველა სწორად დასრულდება უკვე საწყისიდან.
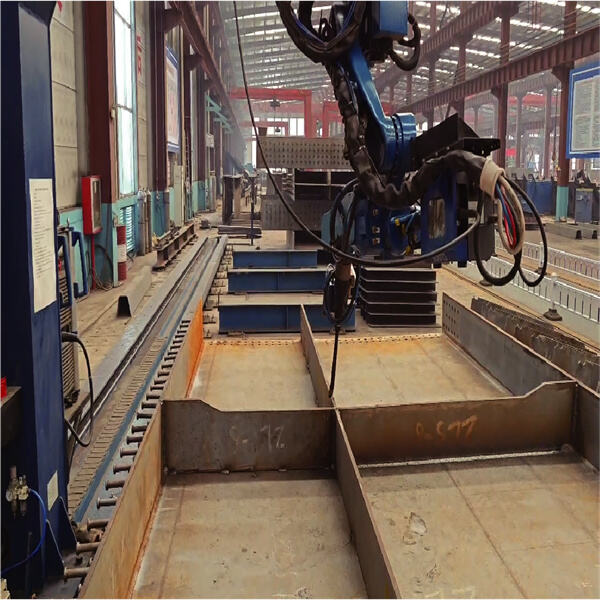
Ლაზერული ტრიანგულაციის სენსორები ასევე ძალ Gaussian მართლად შეიძლება გამოიყენონ რობოტიკის სფეროში. ჩვენ გამოვიყენებთ სენსორებს რობოტიკაში, რათა გაუმჯობესოთ რობოტის სიტუაციური საგნობელობა. ეს უნარი გაუმჯობეს რობოტების შესაძლებლობას მოძრაობის გარშემო მართავიან გარემოში და ინტერაქტი ადგილობრივი აბجექტებით. ვთქვათ, რობოტი გამოიყენება საწყარიშში, ის შეიძლება გამოიყენოს ლაზერული ტრიანგულაციის სენსორები კოლიზიების პრევენციისთვის და პაკეტების აღებისთვის გარკვეული გამოყენების გარეშე ლაზერული სველის რობოტული სისტემა . შემდეგ, როცა ხელშეკრულებების განხორციელებისას, ეს გაუმჯობეს რობოტების მუშაობა ეფექტურად და ზუსტად.
Კვალიტეტის კონტროლი წარმოებაში არის ძველი ნაწილი წარმოების პროცესში, რომელიც უზრუნველყოფს, რომ პროდუქტები წარმოება სწორად და მიუხედავად გარკვეული სტანდარტის. კვალიტეტის კონტროლის პროცესში მოსაძებნელია, რომ ყველა პროდუქტი წარმოება სწორი მanner-ში, ლაზერული ტრიანგულაციის სენსორები შეიძლება გამოიყენონ ეფექტური ამოხსნის როგორც. მაგალითად ეს ლეიზერის სენსორი შეიძლება გაზომას პროდუქტის მასშტაბი და დარწმუნდეს, რომ ის სწორი ზომისაა. ეს აღკავშირებს შეცდომებს ადრე, რაც შეიძლება განახლდეს, სანამ პროდუქტი დასრულდება. ლაზერული ტრიანგულაციის სენსორები კვალიტეტის კონტროლისთვის არანაირი ნებისმიერი დეფექტი არ დატოვებს და დარწმუნებული არის, რომ მხოლოდ სწორი პროდუქტები გაიგზავნენ მომხმარებლებთან.
Ლაზერული ტრიანგულაციის სენსორების ტექნოლოგიის მომავალი როგორც ტექნოლოგია განვითარდება, ეს ლეზერის აპროქსიმაციის სენსორი მხოლოდ მეტი განსაზღვრული იქნება ავტომატიზაციაში და უფრო. ახალი და განათლებული გზები იყენება მათ, რაც მანქანებს და რობოტებს უზრუნველყოფს განსაკუთრებით ჭკვიანი და ეფექტური. მაგალითად, მომავალში თვალიერთ-მართვის მანქანები შეიძლება იყენებენ ლაზერულ ტრიანგულაციის სენსორებს მასალების გამოსაჩენად და გარეშე გადასასვლად. მათ შეიძლება იყენებოდნენ მედიცინურ მოწყობილობებში, რათა დოქტორებს დაახმაროს გარკვეული და უსაფრთხოებით შეურების შესრულებაში. ეს სენსორების გამოყენების შესაძლებლობები არის სამყაროდ უზრუნველყოფილი!
Пекинს Minyue Техნოლოგია Co., LTD, როგორც მსოფლიო მიერ მובילი სამეცნიერო კომპანია ინდუსტრიული რობოტების გარემოში განათლების გარეშე ინტელექტუალური აპლიკაციები. ჩვენ განხილული ვართ წყვეტილი ინტელექტუალური შემუშავება ჩვენს თვით-განვითარებული RobotSmart - ინტელექტუალური გადაწყვეტილების სისტემა, SmartVision - ბინოკულარული სტრუქტურული სინათლე ვიზუალური სისტემა, და SmartEye - ლაზერული ვიზიუალური შემდეგი სისტემა. გთავაზობთ ახალი გენერაციის ინტელექტუალური რობოტული საკერძო და დაჭრივი ამოხსნები.
Გთავაზობთ ძალიან სიმძლავრი საკერძო რობოტის წინა ჩატვირთვა, გვერდიდან ჩატვირთვა, შებრუნებული ჩატვირთვა, განრიგი მაუნტინგი, ინტელექტუალური ტრაექტორიის გეგმა რამდენიმე რობოტისთვის, რამდენიმე გარე ღერძებისთვის და პოზიციონერისთვის საერთო მუშაობისთვის. რეალიზებს რობოტის მოძრაობის სიმულაციას, კოლიზიის გამოკვლევას, ერთობლივობის გარეშე და ღერძის ზღვარის გამოკვლევას.
Სწრაფი, ზუსტი, მთლიანად პროგრამირების გარეშე, მაღალი ეფექტიურობა და ზუსტება. ის ამოხსნის تقليს რობოტების სირთულეად სწრაფ პროცესს და შენახავს სწრაფი პროცესის ჩათვლის დრო.
Გამოყენებით ფუნქციების ძებნასა და გადამოძრაობას, სკანირება სველის კრავის, დადასტურებს კრავის ადგილმდებარეობასა და ინფორმაციას, განახლებს სველის ადგილმდებარეობას 3D ციფრული მოდელის და რეალური ნაწილის შორის, ამოხსნის პრობლემას სველის გადახრის გამო შესაბამისი მასალების შეცდომებისა და თერმული დეფორმაციის გამო.
 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK








