Գլուանդը մեթոդ է, որը օգտագործվում է նյութերի միացման համար: Դուք ջերմում եք նյութերը դեպի الذوبان 和 այնուհետև հում դուրս բերում եք: Երբ նյութերը հում են, դրանք ստեղծում են ուժեղ կապ, որը դրանց կապում է միասին: Գլուանդը շատ արժավոր մատչելիք է, որը կարող է օգտագործվել շատ արդյունքներում: Դա շատ կապված է կառուցումով, երբ մարդիկ կառուցում են տուներ և մոտոցներ: MINYUE լազերային վիճbum ավտոմատացում նաև օգտագործվում է գործնարաններում՝ սարքեր սարքելու համար, ինչպիսիք են մեքենաները և մեխանիզմները: Գլուանդը նաև օգտագործվում է անապատում արտադրելու համար, խաղաքարեր և նույնիսկ տնային արդյունքներ:
Ավտոմատացված հանգեցումը սահմանվում է որպես տեխնոլոգիա, որը օգտագործում է մեքենաներ և սարքեր հանգեցման գործընթացի օգնության համար: Հանգեցումը դառնում է արագ, ճշգրիտ և ավելի արդյունավետ այս պատճառով: Երբ մենք ասում ենք «արագ», մենք նշում ենք, որ աշխատանքը կատարվում է պակաս ժամանակում: Կոորդինատային հանգեցման րոբոտը, այն կոչվում է, քանի որ աշխատում է 3-չափանի կոորդինատային համակարգում, «շատ ավելի ճշգրիտ» է: Եվ «ավելի արդյունավետ» նշանակում է, որ այն կատարվում է ավելի շատ ժամանակի և ռեսուրսների խանգումով:
Մեքենաների օգտագործման առավելություններ՝ ձեռնաշարժ համակարգից - մեկ ամենակարևոր առավելությունն այն է, որ կարող է օգնել ընկերություններին խուսափել ժամանակից և գումարներից: MINYUE ռոբոտային 悍հոգնական ավտոմատացման կատարել պետք է բոլոր վիճահանգում աշխատանքը, և դա շատ արագ է սեփական մեթոդներից։ Սա օգնում է նրանց ավարտելու նրանց խնդիրները ժամանակի սահմանափակումներում և ավարտելու վերջնաժամանակները։ Դա նաև նշանակում է, որ նրանք կարող են վերցնել ավելի շատ պրոեկտներ իրենց միջոցներում, և պոտենցիալապես բերել ավելի շատ դրամ։
Ավտոմատացնել աշխատանքը նաև տալիս է մեկ այլ մեծ գործոն՝ կարող է պահել աշխատողներին ավելի ան전։ Վիճահանգը պատահականում կարող է դառնալ անտառուցում, ինչպես եթե աշխատողներին պահանջվում է դրվել անհարմար կամ անհարմար դիրքերում։ Աշխատանքը տեխնիկայի հետ օգնում է աշխատողներին հեռացնել այս անտառուց դիրքերը։ Նրանք կարող են հետազոտել մեքենաները անտառուց հեռավորությունից, այնպես որ մնալու անտառուց ճանապարհից։
Ավտոմատացված հանգեցումը շարժում է շատ կազմակերպություններ, որպեսզի օպտիմալացնեն իրենց գործողությունները և ավելացնեն իրենց դարձնողությունը և արդյունավետությունը: Նրանք կարող են արագացնել պրոեկտի ավարտման ժամկետները՝ օգտագործելով մաքներ: Սա շատ կարևոր է, երբ նրանք պետք է հասնեն ժամկետներին կամ գործունեությունները ցանկանում են իրենց պատվերները արագ ստանալ: Դապական, որ նրանք կարող են ավտոմատացնել հանգեցումները, որպեսզի համոզվեն, որ առաջին անգամ անցկացնում են ճիշտ, որովհետև նվազեցնում են հանգեցումների չափարկումը: Դա նշանակում է, որ պակաս նյութեր չափարկվում են, որը ոչ միայն խանգիստում է դրամանքը, բայց նաև բարձրացնում է պատրաստվող արտադրանքների որոշակիությունը:
Ռոբոտային հանգեցում ավտոմատացումը՝ առաջացած տեխնոլոգիայի ուժով, շատ կարևոր մաս է ժամանակակից արտադրողության գործընթացում: Հիմա շատ կազմակերպություններ օգտագործում են ռոբոտային տեխնոլոգիան և այլ ամենանոր մաքներ հանգեցումից հետազոտող աշխատանքների համար: Այս սարքերը կարող են ծրագրավորվել, որպեսզի կարողանան կրկնելու նույն հանգեցումները, կրկնելով և կրկնելով: MINYUE ավտոմատացված 捍дինգ ռոբոտ թույլ է տալիս ստանալ նույն արդյունքը, յուրաքանչյուր անգամ համարյալությամբ, ինչը շատ կարևոր է արտադրողության մեջ:

Երեխանոցները հաճախ քննարկում են ավտոմատացման ազդեցությունը 悍CADE արդյունաբերության գլուանդի վրա: Այն ունի շատ առավելություններ تقليսի մեթոդներից, և այդ պատճառով շատ մասնագետներ համոզված են, որ ավտոմատացումը կդառնա գլուանդի ապագան: MINYUE ավտոմատացված ռոբոտական վառունք կարող է կատարել գլուանդի աշխատանքներ ավելի արագ և ճշմարիտ, քան մարդկանց գլուանդները: Սա նշանակում է բարձր արդյունավետություն՝ ավելի շատ աշխատանք փոքր ժամանակում:
Beijing Minyue Technology Co.,LTD, որը համարվում է աշխարհի նախկին գեղատեսական տехնոլոգիայի կազմակերպությունը՝ արդյոք ինդուստրիալ ռոբոտների ոչ տարածաշրջանային ինտելեկտուալ կիրառման ոլորտում։ Մենք մասնագետ ենք առանց ծրագրավորման սեփական ինտելեկտուալ UFACTURING-ի վրա, օգտագործելով մեր սեփական արտադրած RobotSmart - Ինտելեկտուալ 抉cision Making System, SmartVision - Binocular Structured Light Vision System և SmartEye - Laser Vision Seam Tracking System։ Առաջարկում ենք նոր գերասենյակային ինտելեկտուալ ռոբոտային համեմատում և ստիրում լուծումներ։
Արագ, ճշգրիտ, լինելով անծրագրային, բարձր արդյունավետությամբ և բարձր ճշգրտությամբ։ Դա լուծում է pä դարձնում է ավելի հեշտ այն բարդ ուսուցման գործընթացը, որը հանդիսանում է تقليստական ռոբոտների համար, ավելացնելով ուսուցման գործընթացի կանգ ժամանակը։
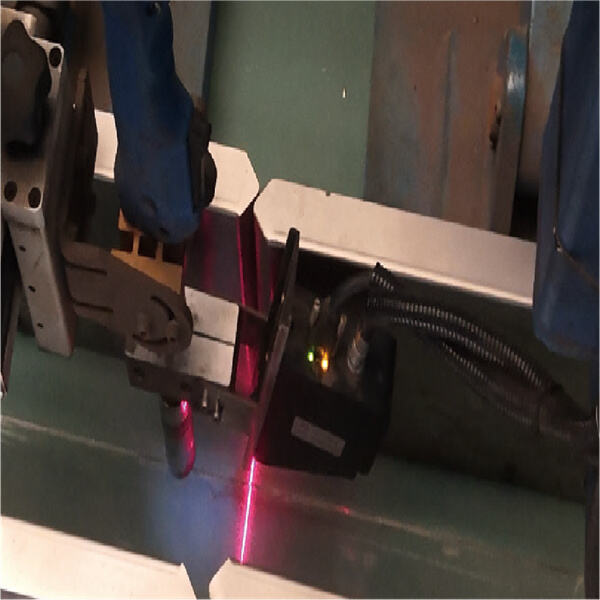
Օգտագործում է գտնելու և հետևելու ֆունկցիան, սկանավորելով վիճbum հատվածը, հաստատելով վիճbum հատվածի դիրքը և տեղեկատվությունը, որպեսզի حيحուղանակենք վիճbum դիրքը միջև 3D թվային մոդելային գծագրում և իրական աշխատանքային մասին, լուծելով վիճbum սխալների պատճառով մուտքային նյութերի սխալների և ջերմային դեֆորմացիայի պատճառով։
Առաջարկում է հզոր վիճակագրական ռոբոտ, որը ենթադրում է առաջի բեռնում, կողմից բեռնում, փոխադարձ բեռնում, գանտրի մուտք, բանավեճ տրայեկտորիայի պլանավորում մի քանի ռոբոտների համար, մի քանի արտաքին առանցքների և դիրքաշրջի համատեղումների: Հասնում է ռոբոտի շարժման միմաստիկական մոդելավորման, հարթադիրքի հայտնաբերում, միակության հանգումից խուսափումին և առանցքի սահմանների հայտնաբերում։
 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK








