Բայց վերադառնանք ստրուկտուրավորված լույսի սենսորներին, այս փոքր սարքերը օգտագործվում են պատկերների ստացման համար՝ ինչպես պարզեցնում են միջավայրի հասկանալու կերպը։ Դրանք թույլ են տալիս մեզ տեսնել օբյեկտները այնպես, ինչպես մենք կարող չենք տեսնել դրանք միայն մեր սովորական արտաքիններով։ Այսպիսով, ներկայացնենք ստրուկտուրավորված լույսի սենսորներին, ինչպես աշխատում են դրանք և ինչպես կարող են օգտագործվել բոլորի համար։
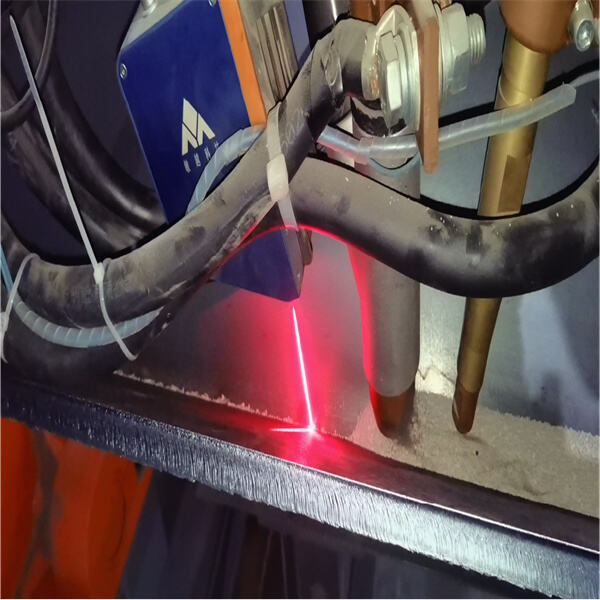
Ստրուկտուրավորված Լույսի Սենսորի Աշխատանքը. Ստրուկտուրավորված լույսի սենսորները պրոեկտում են մի հատուկ լույսի անհամարժեք նախագծով օբյեկտի վրա։ Այլ կերպ ասած, կենսացրեք այն, որ դուք սեղմում եք լույսի լամպ հատուկ նախագծով՝ օրինակ կետերի կամ շարունակների տեսքով՝ մակերեսի վրա։ Այս լույսի նախագծը կարևոր է, քանի որ այն թույլ է տալիս սենսորին ստեղծել մանրամասն 3D քարտեզ օբյեկտի մասին։ Օբյեկտի ձևը և տեքստուրան ազդեցություն են հարկավորում այն կերպ, որ լույսը ազդում է դրանից դուրս գալիս մակերեսից։ laser ճառագայթի սենսոր նկատում է այս փոփոխությունները լույսի դաշտում: Տվյալները ստեղծում են պարզագույն 3D պատկեր օբյեկտի, թույլատում է քառակուսիների հատուկ անկյունները լուսանկարացնել անդամացուցակի ճանաչում կոչում է շրջանաձև օբյեկտի շուրջը, ինչպես մարդ շարժվում է շատ կողմերից համար ստատուա դիտարկելու համար:
Կառուցվածքային լազերային լուսավոր սենսոր կարևոր է օբյեկտների սահմանափակ և ճշգրիտ 3D պատկերներ ստանալու համար: Այդ սենսորները թողնում են գիտնականներին և ինժեներներին ճշգրիտ չափելու հնարավորությունը օբյեկտի մի քանի 특성ների, ինչպիսիք են՝ ձևը, չափսերը և ինչպես է նրա մակերևույթը։ Օրինակ, խաղաzeugների կամ մաքսային սարքերի ստեղծման դեպքում կարևոր է ունենալ ճիշտ չափսեր և ձև։ Դրանից հետևում է, որ որքան կարևոր է ունենալ ճիշտ գործիքներ այդ բաների ստուգման համար։ Դուք սովորել եք այդ տվյալների մասին՝ ստուգողության ժամանակ այդպիսի աշխատանքների համար գործարաններում, ինչպիսիք են Wok to Walk-ը՝ որպեսզի համոզվենք, որ այն ճիշտ և աمنականությամբ ստեղծվում է։
Կառուցված լույսի սենսորները ունեն կարևոր դեր գործkedտուններում, քանի որ դրանք թողնում են ռոբոտներին և մեքենաներին „տեսնել“ և պարզել շրջապատումը: Կարծեք այնպես, ինչպես մարդիկ օգտագործում են իրենց աչքերը իրենց գործողությունները aedaոնելու համար: Ռոբոտներին նաև պետք է լինի այդ կարողությունը՝ эффեկտիվորեն գործելու համար: Այդպիսի համակարգեր, որոնք օգտագործում են կառուցված լույսը, լեզերային մոտեցման սենսոր , օգնում են արտադրամասներին իրենց արտադրության գործընթացները ավելի ճշգրիտ և արդյունավետ դարձնել: Դա նաև նշանակում է, որ դրանք կարող են արտադրել արտադրանքները արագ և պակաս սխալներով: Այս տեխնոլոգիան խաղում է շատ կրիտիկական դեր արտադրանքների համար, որոնք արտադրվում են համապատասխան բարձր որակով, ինչը պահում է գործնականներին բավականաչափ բարեկամություն:
Վերջին մի քանի տարիներում կառուցվածքային լուսի սենսորների տեխնոլոգիայում եղել են մեծ դրամաτιկ հաջողություններ, որոնք փոխարինել են այնպիսին, ինչպես մենք չափում ենք բաները: Այս նոր սենսորները փոքր են, արագ և հիմա ավելի ճշգրիտ, քան անցկացի մինչև։ Սա թույլ է տալիս գիտնականներին և ինժեներն ավելի լավ չափումներ կատարել և կառուցել օբյեկտների շատ մանր 3D մոդելներ։ Օրինակ, փոքր սենսոր կարող է այժմ գրավել մանրամասներ, որոնք դժվար էին նկատել անցկացի, ինչը օգնում է դիզայնների և արտադրանքների դարձնելու լավագույն։
Բարդ ինտելիգենցիայի (AI) օգտագործումը՝ մարդկանց օգնելու համար որևէ աշխատանք կատարելու դեպքում, կարող է դա անվտանգ դարձնել շատ ավելի անվտանգ, քանի որ ամենավտանգ աշխատանքները կարող են գնալ ռոբոտներին։ Օրինակ, որոշ ռոբոտներ օգնում են հետազոտել տեղեր, որոնք դժվար են մարդկանց հասնելու համար, ինչպիսիք են խումբ ծովերը կամ դիմացի տարածությունը։ Կառուցվածքային լուսի սենսորները թույլ են տալիս այս ռոբոտներին գտնել և փոխազդել իրենց շուրջ գտնվող օբյեկտների հետ։ Ռոբոտները «տեսնում» են օբյեկտները ավելի հասկանալի դեպքում այս սենսորների հետ։ մեծ արագության լազերային սենսոր այնպես, որ դրանք չեն հատվեն ինչ-որ բանի դեմ, ինչը դարձնում է դրանց ավելի աمن և ավելի արդյոքներ դրանց աշխատանքներում։ Սա կարևոր է ռոբոտների հաջող աշխատանքի համար տարբեր միջավայրերում։
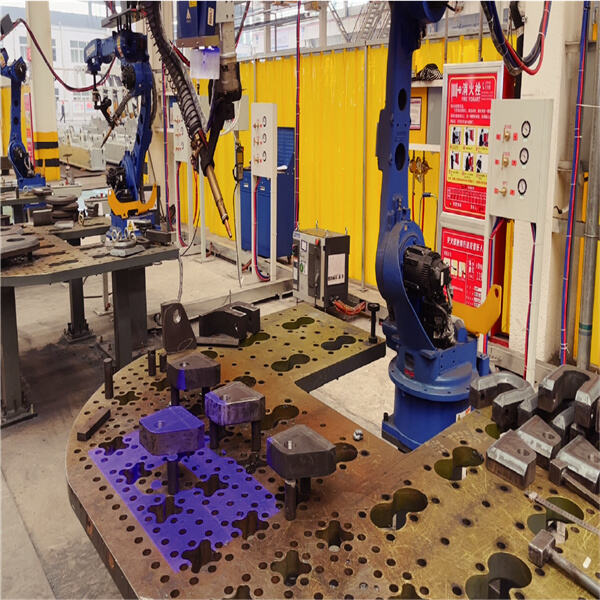
Beijing Minyue Technology Co.,LTD, որը համարվում է աշխարհի նախկին գեղատեսական տехնոլոգիայի կազմակերպությունը՝ արդյոք ինդուստրիալ ռոբոտների ոչ տարածաշրջանային ինտելեկտուալ կիրառման ոլորտում։ Մենք մասնագետ ենք առանց ծրագրավորման սեփական ինտելեկտուալ UFACTURING-ի վրա, օգտագործելով մեր սեփական արտադրած RobotSmart - Ինտելեկտուալ 抉cision Making System, SmartVision - Binocular Structured Light Vision System և SmartEye - Laser Vision Seam Tracking System։ Առաջարկում ենք նոր գերասենյակային ինտելեկտուալ ռոբոտային համեմատում և ստիրում լուծումներ։
Օգտագործում է գտնելու և հետևելու ֆունկցիան, սկանավորելով վիճbum հատվածը, հաստատելով վիճbum հատվածի դիրքը և տեղեկատվությունը, որպեսզի حيحուղանակենք վիճbum դիրքը միջև 3D թվային մոդելային գծագրում և իրական աշխատանքային մասին, լուծելով վիճbum սխալների պատճառով մուտքային նյութերի սխալների և ջերմային դեֆորմացիայի պատճառով։
Առաջարկում է հզոր վիճակագրական ռոբոտ, որը ենթադրում է առաջի բեռնում, կողմից բեռնում, փոխադարձ բեռնում, գանտրի մուտք, բանավեճ տրայեկտորիայի պլանավորում մի քանի ռոբոտների համար, մի քանի արտաքին առանցքների և դիրքաշրջի համատեղումների: Հասնում է ռոբոտի շարժման միմաստիկական մոդելավորման, հարթադիրքի հայտնաբերում, միակության հանգումից խուսափումին և առանցքի սահմանների հայտնաբերում։
Արագ, ճշգրիտ, լինելով անծրագրային, բարձր արդյունավետությամբ և բարձր ճշգրտությամբ։ Դա լուծում է pä դարձնում է ավելի հեշտ այն բարդ ուսուցման գործընթացը, որը հանդիսանում է تقليստական ռոբոտների համար, ավելացնելով ուսուցման գործընթացի կանգ ժամանակը։
 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK








