Սեյմ հետագծող սենսորները կարևոր սարքեր են, որոնք կիրառելիս համեմատվում են գերուստացուցականների հետ, որոնք կիսվում են իրենց դիտարկությամբ այլ մարդկանց հետ: Նրանք թողնում են ռոբոտներին հատկացնել և հետագծել ճանապարհը, որը պետք է օգտագործեն անցկացնելու ժամանակ նյութերը միմյանց հետ միացնելու համար: Միացված միացումները կրիտիկական նշանակություն ունեն այս սենսորների համար, և դրանք համոզված են, որ միացումը կտեղադրվի ճիշտ միացումում ճիշտ ջերմության մուտքով: Այդ սենսորների առկայության դեպքում ռոբոտներին կդժվարանա կատարել իրենց աշխատանքը արդյունավետ ձևով:
Գործալից հետևող սենսորները նման են GPS-ին՝ մարդկանց օգնելու համար նավիգացիայի համար: Երբեմն ինչպես GPS-ը մեզ ցույց է տալիս, որտեղ գնալ, այդ սենսորները գիտելիքներ են տալիս ռոբոտներին՝ համոզվելու համար, որ նրանք կապույտում են ճիշտ վայրում: Եթե ռոբոտները չունեին այսպիսի գիտելիքներ՝ ցույց տալու համար ճիշտ ուղղությունը, նրանք կարող են կապույտել սխալ վայրում: Սա կարող է տալ անկարգ և թույլ կապույտներ, որոնք կկոտրվեն ստրեսի դեպքում: MINYUE լազերային սեվագիրավոր սենսոր արտահայտել ռոբոտներին հետևել ճիշտ ճանապարհը, թույլատրելով ռոբոտին ստեղծել կոշտ և ճշգրիտ կապումներ յուրաքանչյուր անգամ, երբ նրանք կապում են:

Կողմնակի հետևումի սենսորները դիրքավոր սարքեր են: Նրանք կարող են նաև փոխել կապումի գործիքը, մինչդեռ ռոբոտը աշխատում է: Դա համոզում է, որ սենսորները կարգավորում են, թե որքա՞ն ջերմություն ստանում է կապումը: Սա օգտագործում է, քանի որ ճիշտ ջերմությունը կարևոր է՝ համոզելու համար, որ բոլոր տարանցքները կամ գումարումները (որտեղ մեկ կապում գտնվում է վերևում մյուսի վրա) կհեռացվեն վերջնական կապումում: MINYUE գործընթացի սենսորի հետևումը թույլատրել ռոբոտներին կապել արագ և ավելի արդյունավետ ձեռնարկում: Այն ոչ միայն խուժում է ժամանակ, այլ նաև օգնում է խուժել դրամական միջոցների երկար ժամանակ:
Սեվման հաստատունության սենսորները օգտագործում են մասնավոր քամերաներ կամ լազերներ սեվի սկանավորման համար՝ երկու բաղադրիչների միացման գիծ: Նրանք ստեղծում են ճշգրիտ քարտեզ ռոբոտի համար։ Այս սենսորները կարող են դիտել սեվը, օրինակ, եթե կան որևէ բաժանումներ կամ սխալ դիրքեր, ապա նրանք կարող են որոշել, որ բաղադրիչները ճիշտ դիրքում են կամ ոչ։ Երբ նրանք գտնում են այս խնդիրները, նրանք կարող են արագ փոխել սեվման գործիքը՝ որպեսզի ուղղեն դրանք։ MINYUE Advanced հանգիստի հետ հետևիչ դեռևս կարող են իրականացնել մի տեսակ ավտոմատացված տեխնոլոգիա, որը կոչվում է համարձակ ինտելեկտ, որպեսզի ուսունեն և կարգավորեն արժեքները՝ լավ աշխատելու համար լայն շարքում սեվման կիրառումներում։

Դա հավանաբար հիանալի 특성 է՝ իրականավորված ժամանակին սենսորներ գործարկող համակարգի հետ հետևում են դա նման է ունենալ կամ ցանկացած ռոբոտ, որը կարող է մտածել և ինքնուրույն հաջորդել։ Սա նշանակում է, որ ռոբոտը անընդհատ հետազոտում է ստիխ և պատիկ փոխանցում է, եթե անհրաժեշտ է։ Այսպիսով, ռոբոտները կարող են ստեղնել անսխալ համագույններ անմանուական մարդկանց օգնության առ դեպի։ Սա այնքան օգնում է համագույնների որակին, որը նաև նվազում է սխալների քանակը աշխատանքում, որպեսզի ավելի քիչ կրկնենք աշխատանքը՝ ավելի շուտ և ավելի քիչ գործարքներով փոխարկելու համար։ Իրականում, իրական ժամանակի ստիխի հետևումը դարձնում է համագույնների գործընթացը շատ ավելի հեշտ և արագ։
Beijing Minyue Technology Co.,LTD, որը համարվում է աշխարհի նախկին գեղատեսական տехնոլոգիայի կազմակերպությունը՝ արդյոք ինդուստրիալ ռոբոտների ոչ տարածաշրջանային ինտելեկտուալ կիրառման ոլորտում։ Մենք մասնագետ ենք առանց ծրագրավորման սեփական ինտելեկտուալ UFACTURING-ի վրա, օգտագործելով մեր սեփական արտադրած RobotSmart - Ինտելեկտուալ 抉cision Making System, SmartVision - Binocular Structured Light Vision System և SmartEye - Laser Vision Seam Tracking System։ Առաջարկում ենք նոր գերասենյակային ինտելեկտուալ ռոբոտային համեմատում և ստիրում լուծումներ։
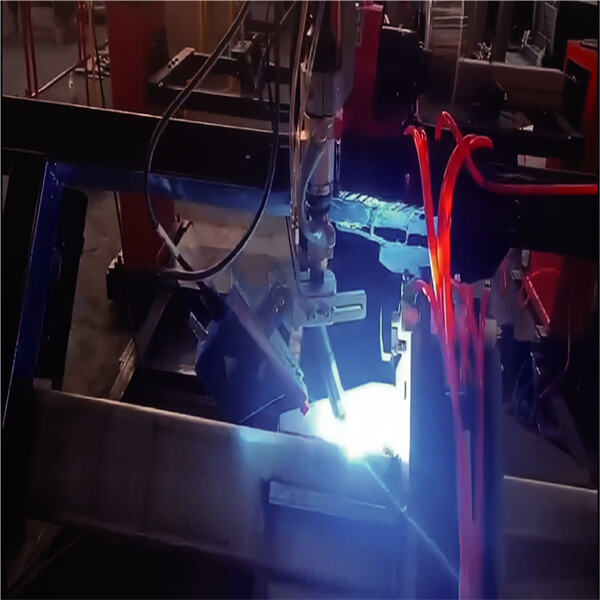
Օգտագործում է գտնելու և հետևելու ֆունկցիան, սկանավորելով վիճbum հատվածը, հաստատելով վիճbum հատվածի դիրքը և տեղեկատվությունը, որպեսզի حيحուղանակենք վիճbum դիրքը միջև 3D թվային մոդելային գծագրում և իրական աշխատանքային մասին, լուծելով վիճbum սխալների պատճառով մուտքային նյութերի սխալների և ջերմային դեֆորմացիայի պատճառով։
Առաջարկում է հզոր վիճակագրական ռոբոտ, որը ենթադրում է առաջի բեռնում, կողմից բեռնում, փոխադարձ բեռնում, գանտրի մուտք, բանավեճ տրայեկտորիայի պլանավորում մի քանի ռոբոտների համար, մի քանի արտաքին առանցքների և դիրքաշրջի համատեղումների: Հասնում է ռոբոտի շարժման միմաստիկական մոդելավորման, հարթադիրքի հայտնաբերում, միակության հանգումից խուսափումին և առանցքի սահմանների հայտնաբերում։
Արագ, ճշգրիտ, լինելով անծրագրային, բարձր արդյունավետությամբ և բարձր ճշգրտությամբ։ Դա լուծում է pä դարձնում է ավելի հեշտ այն բարդ ուսուցման գործընթացը, որը հանդիսանում է تقليստական ռոբոտների համար, ավելացնելով ուսուցման գործընթացի կանգ ժամանակը։
 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK








