Լազերային շուրջ գտնելը դեռևս հետաքրքիր տեխնոլոգիա է, որը օգտագործում է լույսի հողափոխները՝ կորում ենք նվիրականորեն և ճշգրիտ թացնելու համար: «마법의 գործիք»-ի օգնությամբ (որը օգտագործում է աստղի ճանապարհը՝ չափում ենք հարթ մակերևույթը ուղղաձիգ գծերով) մաքինայով չափում ենք նվիրական ուղղաձիգ գծերը՝ դա ամեն արժեքավոր նվիրականին տրամադրելու համար: Այս գեղացկեցիկ տեխնոլոգիան, որը հայտնի է որպես լազերային տեխնոլոգիա, փոխվում է գերականոնավորման գործընթացի տեխնոլոգիական հասկացությունը՝ մատնելով կոմպոզիցիան և նվիրականից ստեղծված այլ բոլոր ապարատները: MINYUE Լազերային ստորագրով հետագծի հետազոտության համակարգ օգնում է արագացնել նվիրականից ստեղծված ապարատների ստեղծման գործընթացը՝ դա դուք աշխատելիս դարձնում է ավելի հեշտ և ճշգրիտ: Արդյունքում սխալների քանակը փոքրանում է, իսկ ապարատները դարձնում են ավելի գեղեցիկ:
Արդյոք երբեք ես տեսել մաքինա, որը կտրում է թարգամ լազերով? Դա հենց լազերի արդյունքաբար ուժն է!! Այս հրաշալի գործիինքը տալիս է ամենաերկար պատրաստումները՝ խուստ կտրումներից խուսափում ենդամենը։ Լազերային տեխնոլոգիայի օգտագործումը մաքինայում թողնում է այն աշխատել ավելի արագ և ավելի արդյունավետ։ Սա թույլ է տալիս մարդկանց արտադրել համարյալներ, ձեռնարկեր և այլ ապրանքներ շատ արագ քան առաջինս։ Սա դարձնում է ամբողջ արտադրության գործընթացը ավելի հեշտ՝ լազերային ստորագրումով, որը խուսափում է ժամանակի և գումարի կորցմունքից այդ ապրանքները արտադրող ընկերությունների կողմից։
Համարյալներ ստեղծելիս ճշգրտությունը շատ կարևոր է։ Լազերային ստորագրումը օգնում է արագացնել ճշգրտության արտադրությունը՝ համոզվելով, որ յուրաքանչյուր կտրում ճիշտ է։ MINYUE լազերային սեվագիրավոր սենսոր օգնել մաքինայի ճիշտ կտրել թերևը, չթողնելով սխալի հնարավորություն: Սա շատ լավ բան է, քանի որ դա նշանակում է, որ բոլոր ձեր համպատասխանությունները կհամապատասխանեն ճանաչելի տեսքին: Ծառայող լազերային շահույթների որոնումը դարձնում է ամբողջ ապրանքի ստեղծման գործընթացը ավելի լավ և ճշգրիտ: Արդյունքում, դրանք ստեղծում են որոշակի ապրանքներ յուրաքանչյուր անգամ, և կարող են համոզված լինել, որ իրենց գնումը կլինի լավ։
Երբ գնահատում ենք համպատասխանությունների և տեքստիլների արտադրությունը, որոշակիության կառավարումը կարևոր է: Դուք ցանկանում եք համոզվել, որ ամենին լավ է արտադրված, այնուամենայնիվ՝ MINYUE սենսորներ գործարկող համակարգի հետ հետևում են դարձնում է որոշակիության կառավարումը ավելի լավ, մանրամասն ստուգելով յուրաքանչյուր թերևի մասը: Լազերային ճառագայթները նաև հայտնաբերում են թերևի բոլոր դեfects-ները կամ դեfects-ները, որպեսզի միայն ամենաբարձր որոշակիության մասերը անցնեն արտադրությանը: Քանի որ համպատասխանությունները գնում են MINYUE-ից: Եվ շնորհիվ լազերային շահույթների որոնմանը, մենք ունենք ստուգումը, և կարող ենք վստահել գնած ապրանքներին:

Սա է, թե ինչպես է դիմում լեզերային տեխնոլոգիան՝ մեքենա, որը կարող է սահքել կոտոնի միջոցով լուսաբանական ճառագայթներով! Անկախ լեզերային շահագործության շնորհիվ, մեքենաները արագացնում են kläthes, bags և այլ ապրանքների ստեղծումը։ MINYUE հանգիստի հետ հետևիչ օգնում են չափել կոտոնի ուղիղ գծերը, որպեսզի յուրաքանչյուր հատ սահքվի ճշգրտությամբ։ Այս համեմատական տեխնոլոգիան հեռացնում է կոտոնի ապրանքների մարմնամասն արտադրությունը՝ ավելի պարզ և իրականացնելի դարձնելով։ Կոտոնի ապրանքների ստեղծման մասին ապագա է և լինում է լեզերային շահագործության շնորհիվ!
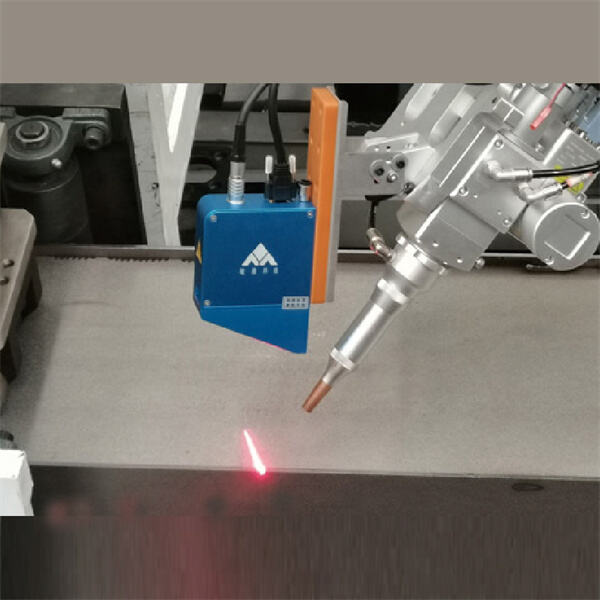
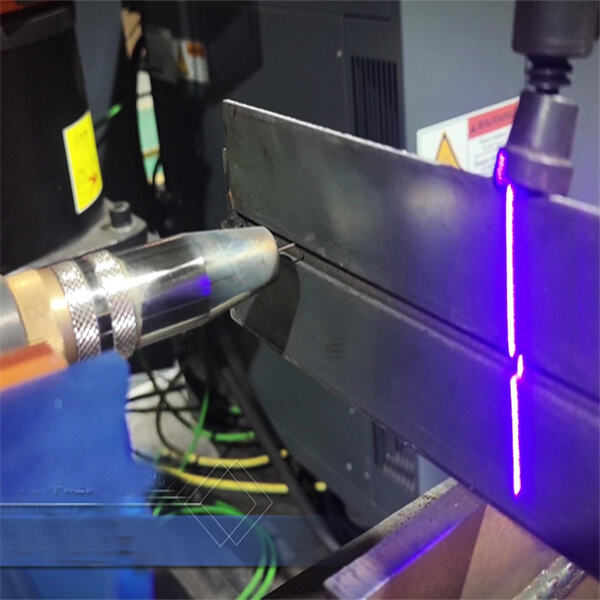
Առաջարկում է հզոր վիճակագրական ռոբոտ, որը ենթադրում է առաջի բեռնում, կողմից բեռնում, փոխադարձ բեռնում, գանտրի մուտք, բանավեճ տրայեկտորիայի պլանավորում մի քանի ռոբոտների համար, մի քանի արտաքին առանցքների և դիրքաշրջի համատեղումների: Հասնում է ռոբոտի շարժման միմաստիկական մոդելավորման, հարթադիրքի հայտնաբերում, միակության հանգումից խուսափումին և առանցքի սահմանների հայտնաբերում։
Beijing Minyue Technology Co.,LTD, որը համարվում է աշխարհի նախկին գեղատեսական տехնոլոգիայի կազմակերպությունը՝ արդյոք ինդուստրիալ ռոբոտների ոչ տարածաշրջանային ինտելեկտուալ կիրառման ոլորտում։ Մենք մասնագետ ենք առանց ծրագրավորման սեփական ինտելեկտուալ UFACTURING-ի վրա, օգտագործելով մեր սեփական արտադրած RobotSmart - Ինտելեկտուալ 抉cision Making System, SmartVision - Binocular Structured Light Vision System և SmartEye - Laser Vision Seam Tracking System։ Առաջարկում ենք նոր գերասենյակային ինտելեկտուալ ռոբոտային համեմատում և ստիրում լուծումներ։
Արագ, ճշգրիտ, լինելով անծրագրային, բարձր արդյունավետությամբ և բարձր ճշգրտությամբ։ Դա լուծում է pä դարձնում է ավելի հեշտ այն բարդ ուսուցման գործընթացը, որը հանդիսանում է تقليստական ռոբոտների համար, ավելացնելով ուսուցման գործընթացի կանգ ժամանակը։
Օգտագործում է գտնելու և հետևելու ֆունկցիան, սկանավորելով վիճbum հատվածը, հաստատելով վիճbum հատվածի դիրքը և տեղեկատվությունը, որպեսզի حيحուղանակենք վիճbum դիրքը միջև 3D թվային մոդելային գծագրում և իրական աշխատանքային մասին, լուծելով վիճbum սխալների պատճառով մուտքային նյութերի սխալների և ջերմային դեֆորմացիայի պատճառով։
 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK








