Վաու։ Դուք գիտեք սմարտ գործարանի մասին։ Այսօր այն այնքան հատավոր է ունենալու լավ պատճառ։ Սմարտ գործարանը օգտագործում է այնպիսի հետաքրքիր տեխնոլոգիաներ, ինչպիսիք են MINYUE համոզված ռոբոտ և համակարգչեր՝ արագ ավելի, արդյունավետ և թանգարանական արտադրելու համար։ Կեղծեք դա որպես գործարանի գերակի օգնություն։ Այս գիրքը օգնում է բոլորին համապատասխանել, որպեսզի ամենինչ աշխատի լավագույն մակարդակով, ինչը թույլ է տալիս բոլորին ամենալավ կարգով կատարելու իրենց աշխատանքները։
Եկեք պատմեմ փոքր պատմություն, թե ինչպես է զբաղեցել ստեղծագործությունը տարիների ընթացքում: Առաջին ժամանակներում մարդիկ ստեղծում էին բանալիք ձեռքով, մեկը մեկու հետ: Ինչքան ժամանակ կարող էր անցնել, դուք կարծում եք: Դուրս գալիս է, որ mooie բանալիք ստեղծելու համար կարող էր պահանջվել շատ ժամանակ: Ապա մեքենաները — գործագալի արտադրանքներ, տրանսպորտատորներ — սկսեցին օգնել: Այս գաղափարներին նման MINYUE կառավարական ինտելեկտով ռոբոտներ թույլ տվեց աշխատանքը ավելի արագ և ադամանական կատարել, որոնք մարդիկ կարող էին ստեղծել շատ տարբեր օբյեկտներ և արագ ստեղծել դրանց: Հիմա, սեղմանում համարյալ ստեղծագործությամբ, մենք կարող ենք հասնել ամբողջ նոր մակարդակի արագության և ադամանականության: Երաժշտություն, թե որքան ենք անցել:
Ինչպես կլիներ, եթե մաքինաները կարող էին միմյանց հետ տարածվել և ինքնուրույն päätused դառնան? Իրականում, ճշգրիտ այն է, ինչ նշանակում է սեղման մատակարարումը: Սպեցիալ գործիքների օգտագործմամբ, որոնք կոչվում են սենսորներ և սեղման տեխնոլոգիա, այս մաքինաները կարող են գերազանցել խնդիրները, belum terjadi (և նաև ինքնուրույն վերադարձնել ինքնց): Դա նշանակում է պակաս ժամանակ սպասելու համար վերադարձնելու համար և պակաս սխալներ սեղման ցիկլում: Դա մեզ թույլ է տալիս ավելի արագ կառուցել և ավելի վավեжалի քան անց ինգ: Դա նման է ամբողջ թիմի հետ, որը կազմված է հարավավար մաքինաներից, ինչպես ինտելիգենտ ռոբոտիկայի համակարգեր են համատեղում միասին՝ արդյոք արդյոք արդյոք արդյոք արդյոք արդյոք։

Ընթացքում տեխնոլոգիան օրական ներկայացնում է նոր բաներ, և մենք կարող ենք սպասել որոշ հետաքրքիր փոփոխություններ հաջորդ տարիներում: Դառնացին մի քանի 디จի털 նորությունները՝ կարողանալով տարածքում արտադրել օբյեկտներ՝ օգտագործելով 3D տպիչներ, վիրտուալ իրականությունը թույլ է տվել մշակել բաներ այնպիսի ձևերով, ինչպիսիք չէինք նույնություն տվել: Վարիանտները սահմանափակ չեն: Ես ասած եմ, ո՞վ գիտեր, կարող ենք ունենալ „գործարաններ Մարսում“, որոնք արտադրում են մեր նախատեսումները: Դուք ունեք հանգեցնելի հնարավորություններ:
Հաջորդը, թույլ տվեք մեզ բացատրեմ, թե ինչպես MINYUE համագործակցությունն ձևավորում է առաջին օրերի գործարան։ Կեղծեք վաճառքային մաքինաներ, որոնք վաճառում են խորակներ կամ գործարան, որտեղ ռոբոտներն են կատարում բոլոր անհեթությունները, իսկ մարդիկ ընդունում են գործնական և ստեղծագործական դերեր։ Դա ավելի շատ հավանական է լինի շատ հետաքրքիր, այդպես չէ՞։ Սմարտ գործարանը ավելի լավ դարձնում է աշխատանքային միջավայրը՝ ավտոմատացնելով կրկնվող գործընթացներ։ Դա նշանակում է, որ մարդիկ կուտակեն ավելի շատ ժամանակ իրենց մտածողությունների և ստեղծագործականության վրա, իսկ ոչ կրկնության պատճառով մտավորությունը։
Արագ, ճշգրիտ, լինելով անծրագրային, բարձր արդյունավետությամբ և բարձր ճշգրտությամբ։ Դա լուծում է pä դարձնում է ավելի հեշտ այն բարդ ուսուցման գործընթացը, որը հանդիսանում է تقليստական ռոբոտների համար, ավելացնելով ուսուցման գործընթացի կանգ ժամանակը։
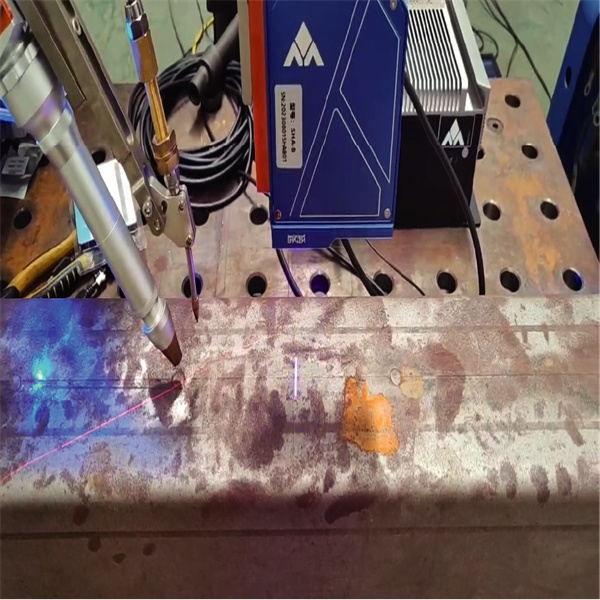
Օգտագործում է գտնելու և հետևելու ֆունկցիան, սկանավորելով վիճbum հատվածը, հաստատելով վիճbum հատվածի դիրքը և տեղեկատվությունը, որպեսզի حيحուղանակենք վիճbum դիրքը միջև 3D թվային մոդելային գծագրում և իրական աշխատանքային մասին, լուծելով վիճbum սխալների պատճառով մուտքային նյութերի սխալների և ջերմային դեֆորմացիայի պատճառով։
Beijing Minyue Technology Co.,LTD, որը համարվում է աշխարհի նախկին գեղատեսական տехնոլոգիայի կազմակերպությունը՝ արդյոք ինդուստրիալ ռոբոտների ոչ տարածաշրջանային ինտելեկտուալ կիրառման ոլորտում։ Մենք մասնագետ ենք առանց ծրագրավորման սեփական ինտելեկտուալ UFACTURING-ի վրա, օգտագործելով մեր սեփական արտադրած RobotSmart - Ինտելեկտուալ 抉cision Making System, SmartVision - Binocular Structured Light Vision System և SmartEye - Laser Vision Seam Tracking System։ Առաջարկում ենք նոր գերասենյակային ինտելեկտուալ ռոբոտային համեմատում և ստիրում լուծումներ։
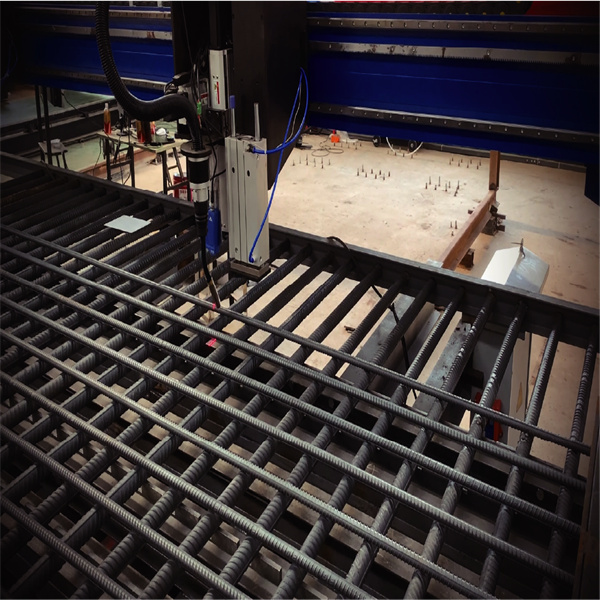
Առաջարկում է հզոր վիճակագրական ռոբոտ, որը ենթադրում է առաջի բեռնում, կողմից բեռնում, փոխադարձ բեռնում, գանտրի մուտք, բանավեճ տրայեկտորիայի պլանավորում մի քանի ռոբոտների համար, մի քանի արտաքին առանցքների և դիրքաշրջի համատեղումների: Հասնում է ռոբոտի շարժման միմաստիկական մոդելավորման, հարթադիրքի հայտնաբերում, միակության հանգումից խուսափումին և առանցքի սահմանների հայտնաբերում։
 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK