EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK



- ภาพรวม
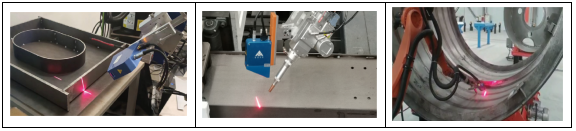
เซนเซอร์ติดตามรอยเชื่อมด้วยเลเซอร์ใช้เลเซอร์ในการส่องผิวของรอยเชื่อมเพื่อสร้างแถบแสงเลเซอร์ ซึ่งจะถูกตรวจจับและสร้างภาพโดยกล้องความละเอียดสูง จากนั้นคุณลักษณะสามมิติของรอยเชื่อมจะถูกแปลงเป็นข้อมูลที่มีโครงสร้างผ่านการประมวลผลด้วยอัลกอริธึม รวมถึงพิกัดของข้อต่อ การไม่สมดุล และช่องว่าง เป็นต้น ข้อมูลนี้จะถูกส่งไปยังคอนโทรลเลอร์ของหุ่นยนต์ เพื่อให้หุ่นยนต์ได้รับเส้นทางและพารามิเตอร์กระบวนการที่จำเป็นสำหรับการเชื่อม ช่วยนำหุ่นยนต์ในการเชื่อมหรือแก้ไขความเบี่ยงเบนของชิ้นงานในเวลาจริง และทำให้เกิดงานเชื่อมที่สมบูรณ์ เมื่อเปรียบเทียบกับโซลูชันอื่นๆ การติดตามรอยเชื่อมด้วยเลเซอร์มีข้อได้เปรียบ เช่น ไม่ต้องสัมผัส แม่นยำสูง รวดเร็ว และมีความยืดหยุ่นดี
เซนเซอร์ใช้การวัดแสงโครงสร้างเชิงเส้น ซึ่งมีความเร็วในการถ่ายภาพเส้นเร็ว ไม่มีการสัมผัส และไม่มีการเคลื่อนที่ของกลไก; มีความสามารถในการปรับตัวสูง สามารถแสดงพารามิเตอร์ของรอยเชื่อมได้; แบบฝังตัวเต็มรูปแบบ พร้อมคอมพิวเตอร์ควบคุมอุตสาหกรรมภายนอกและข้อดีอื่น ๆ อีกมากมาย ทำให้ถูกใช้งานอย่างแพร่หลายในงานเชื่อมอัตโนมัติต่าง ๆ ไม่ว่าจะเป็นกระบวนการเชื่อมใด เราสามารถให้การสนับสนุนที่น่าเชื่อถือและประสิทธิภาพที่คงที่ เพื่อให้มั่นใจในผลลัพธ์ที่ยอดเยี่ยมในสถานการณ์การเชื่อมที่แตกต่างกัน
อินเทอร์เฟซซอฟต์แวร์กราฟิกเต็มรูปแบบ กระบวนการตั้งค่าพารามิเตอร์ รายละเอียดเมนูช่วยเหลือ บุคคลที่ไม่ใช่ผู้เชี่ยวชาญก็สามารถเริ่มต้นใช้งานได้อย่างรวดเร็ว
*การตรวจจับช่องว่างศูนย์หมายถึงเซนเซอร์ที่มีฟังก์ชันนี้ ซึ่งสามารถใช้เพื่อระบุช่องว่างที่มีขนาดต่ำกว่า 0.1 มม.
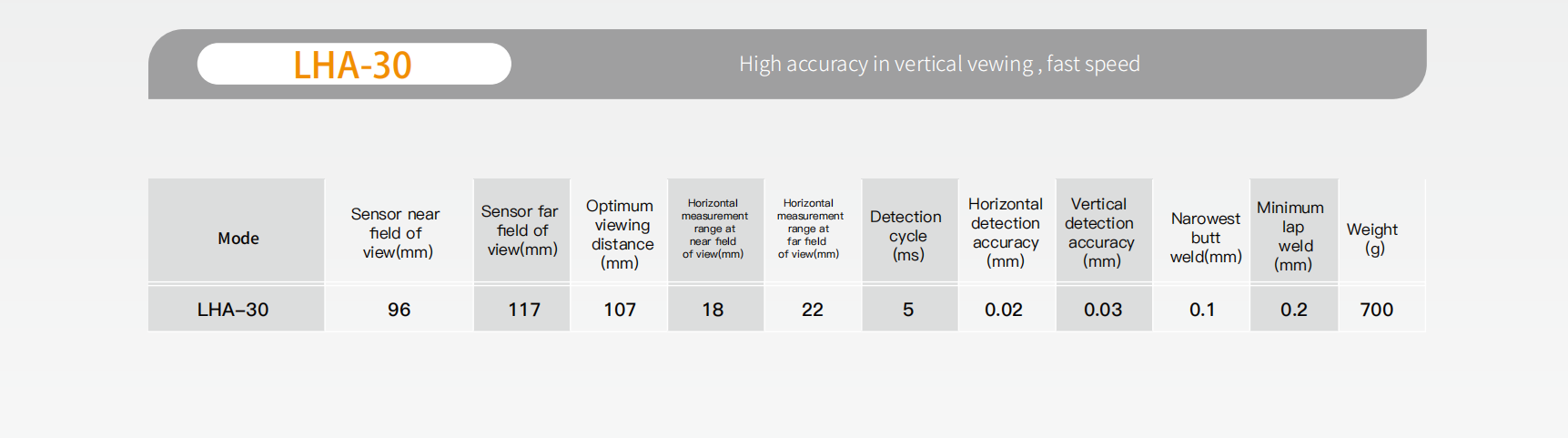
*ระยะสายตาเป็นเพียงค่าอ้างอิง และอาจปรับเปลี่ยนตามความต้องการเฉพาะของผู้ใช้
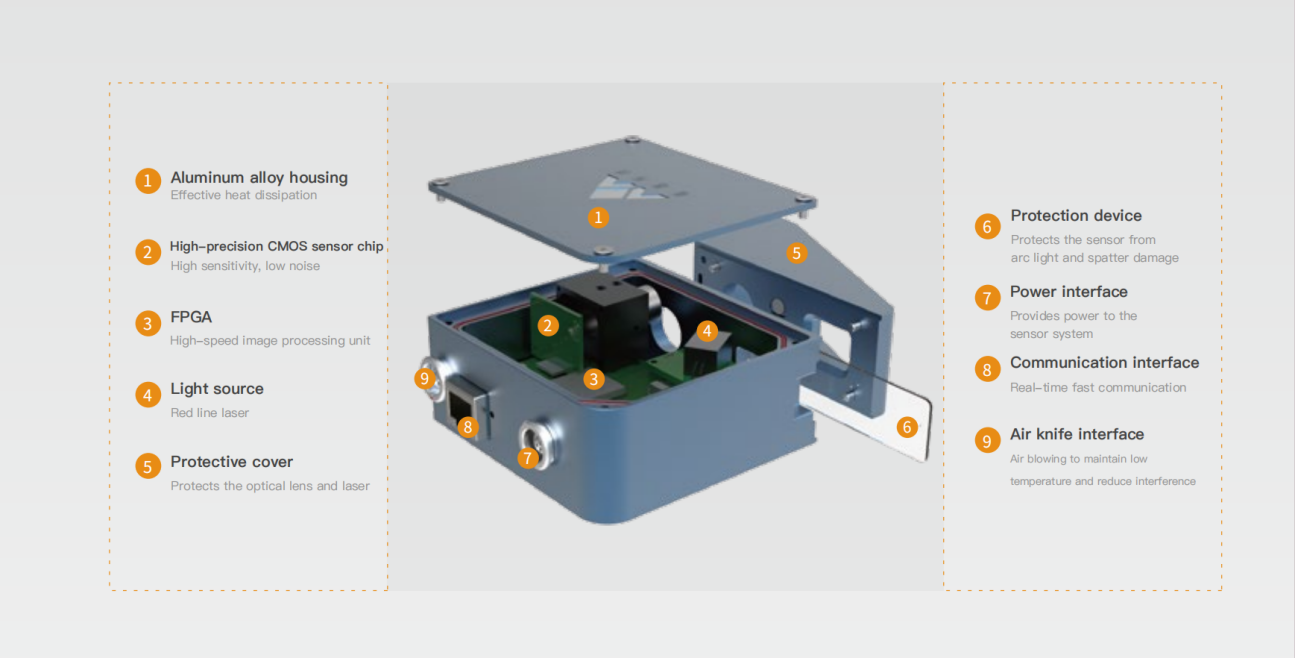
เซ็นเซอร์นี้เหมาะสำหรับการใช้งานที่ต้องการความแม่นยำสูง เนื่องจากไม่ไวต่อแสงรบกวน น้ำ และฝุ่น (IP67) และไม่ได้รับผลกระทบจากสนามแม่เหล็กไฟฟ้า (EMC)
มาพร้อมฟังก์ชันที่ทรงพลัง
01. การแก้ไขตำแหน่งและการเบี่ยงเบน
ฟังก์ชันการวางตำแหน่งและการแก้ไขความเบี่ยงเบนใช้สำหรับสถานการณ์การเชื่อมที่ยืดหยุ่นของชิ้นงานที่มีรุ่นเดียวกันแต่มีความคลาดเคลื่อนที่ไม่เท่ากัน ฟังก์ชันนี้ทำให้มั่นใจได้ว่าไม่จำเป็นต้องมีการแทรกแซงด้วยมือเมื่อสลับชิ้นงาน และหุ่นยนต์จะถูกนำทางโดยระบบการวางตำแหน่งและการแก้ไขความเบี่ยงเบนเพื่อให้เกิดการเชื่อมที่แม่นยำ
การวางตำแหน่งสองจุด เหมาะสำหรับการเชื่อมแบบเลื่อนเส้นตรงในระนาบ 2D
การวางตำแหน่งหลายจุด เหมาะสำหรับการเชื่อมแบบเลื่อนหลายส่วนในระนาบ 2D
การวางตำแหน่งแบบเซกเมนต์ เหมาะสำหรับการเชื่อมแบบเลื่อนหลายส่วนในพื้นที่ 3D
02 การติดตามแบบเรียลไทม์
ฟังก์ชันการติดตามแบบเรียลไทม์ใช้ในสถานการณ์การเชื่อมที่ต้องการประสิทธิภาพสูงและไม่มีการรบกวนในพื้นที่ เซนเซอร์จะถูกติดตั้งอยู่ในตำแหน่งคงที่สัมพันธ์กับหัวเชื่อม และหัวเชื่อมจะปรับเส้นทางการเชื่อมโดยอัตโนมัติตามข้อมูลพิกัด 3D
03. การสแกนและการเชื่อมอัตโนมัติ
ฟังก์ชันการสแกนและการเชื่อมแบบอัตโนมัติช่วยให้เซ็นเซอร์สามารถรวบรวมข้อมูลเรขาคณิตของรอยเชื่อมได้ก่อน ฟังก์ชันนี้เหมาะสำหรับพื้นที่เชื่อมที่สะท้อนแสงสูง พื้นที่เชื่อมแคบ และสถานการณ์เชื่อมที่ซับซ้อน
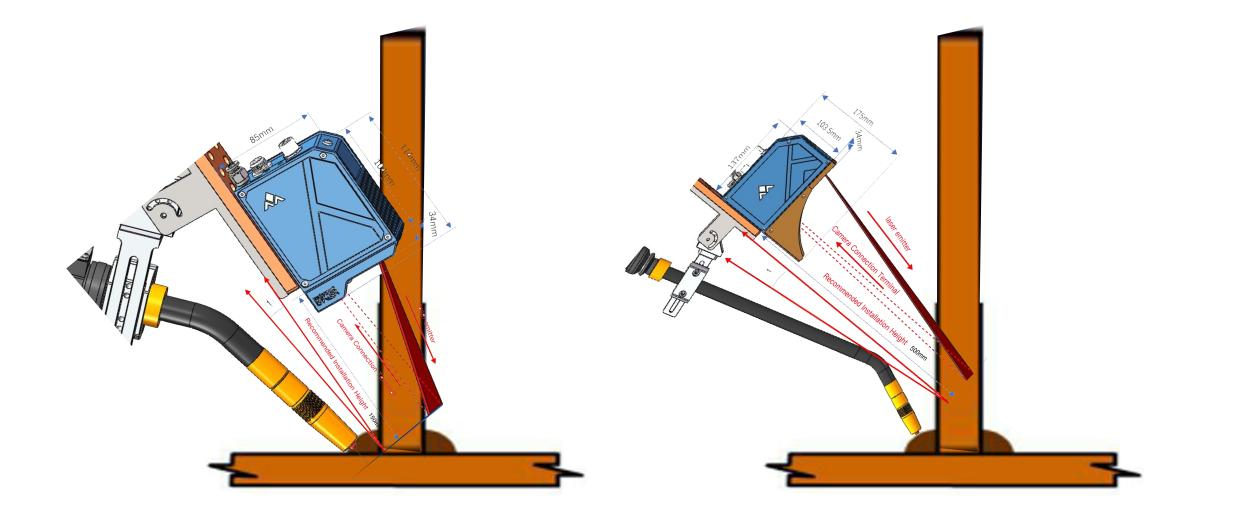
การติดตามรอยเชื่อมด้วยเลเซอร์
การติดตามรอยเชื่อมด้วยเลเซอร์สามารถตรวจจับความเบี่ยงเบนของรอยเชื่อมที่สูง ต่ำ และซ้ายขวาได้
สามารถตรวจจับรอยเชื่อมที่มีช่องว่างเล็กได้
แก้ปัญหาการติดตามรอยเชื่อมสำหรับแผ่นบางที่เชื่อมต่อ
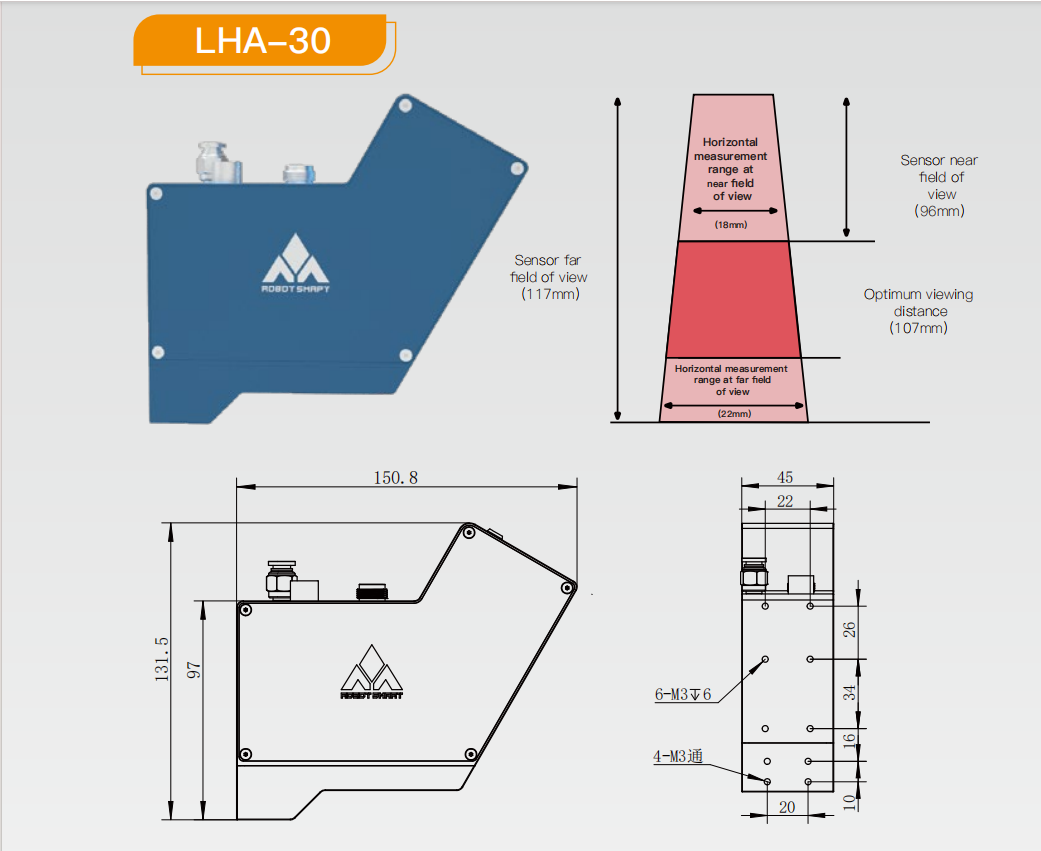
ระยะห่างในการสังเกตที่เหมาะสมที่สุดประมาณ 107 มม.
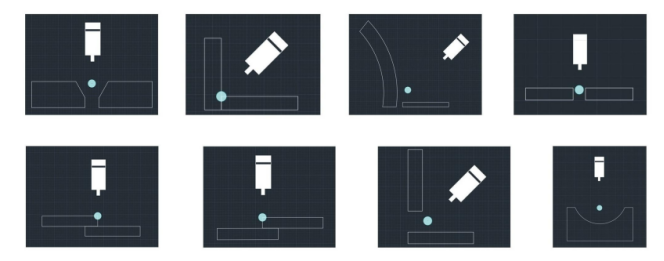
สนับสนุนประเภทของการเชื่อม
การเชื่อมร่อง V
การเชื่อมมุมฉาก
การเชื่อมขอบโค้ง
การเชื่อมต่อแบบต่อกัน
การเชื่อมทับกัน เป็นต้น
ความแม่นยำสูงในแนวตั้ง ความเร็วในการตอบสนองรวดเร็ว เหมาะสำหรับอุตสาหกรรมโครงสร้างเหล็กและเครื่องจักรก่อสร้าง.
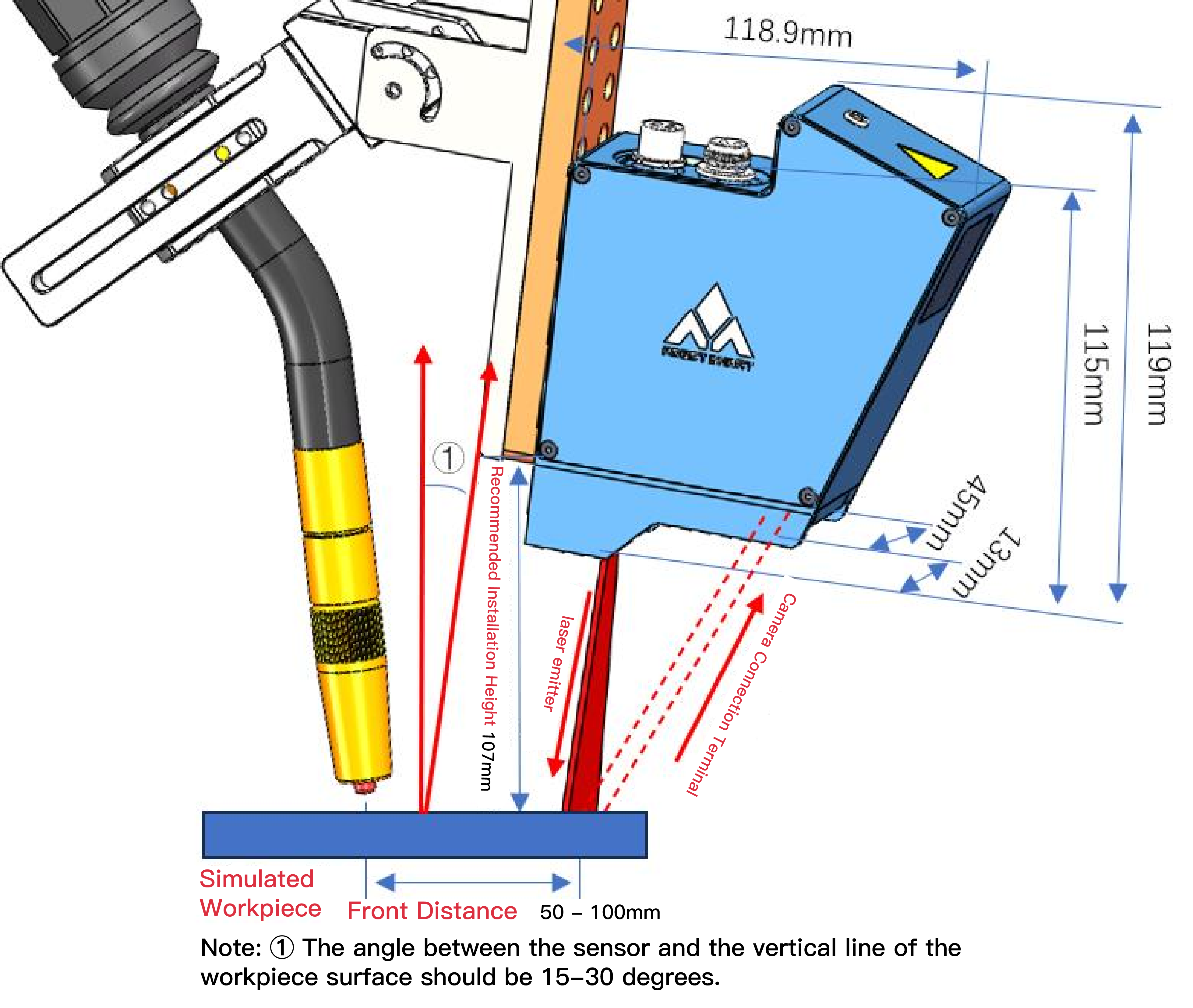
โปรดเลือกประเภทให้เหมาะสมตามขอบเขตการใช้งานจริง เพื่อหลีกเลี่ยงการชนของชิ้นงานกับเซนเซอร์ ภาระของหุ่นยนต์โดยทั่วไปควรมีขนาด 20KG