Bet atgriežoties pie struktūrizēto gaismas senzoru, šie mazie ierīces tiek izmantoti, lai veidotu attēlus tādā veidā, kas vienkāršo vidi sapratni. Tie ļauj mums redzēt objektus tādā veidā, kā mēs iespējams nevarētu tos redzēt tikai ar saviem, nedzirdīgajiem acīm. Tātad aizņemsimies plašāk apskatīt struktūrizētos gaismas senzorus, kā tie darbojas, un kā tie var būt noderīgi visiem.
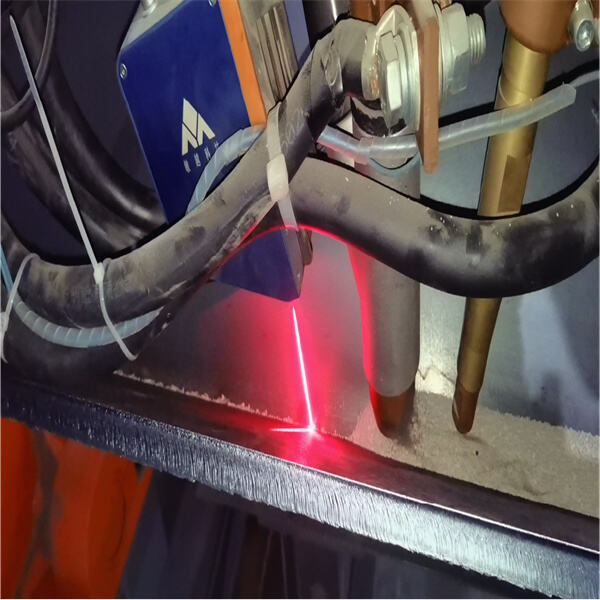
Struktūrizēto gaismas senzora darbība: Struktūrizētie gaismas senzori projicē specifisku gaismas modeli uz objektu. Citiem vārdiem sakot, iedomājieties, ka uz virsmas pieslēdzat spuldzi ar noteiktu dizainu, piemēram, punktiem vai līnijām. Šis gaismas-modelis ir būtisks, jo tas ļauj senzoram izveidot detalizu tuksdimensiju karti no objekta. Objekta formas un tekstūra ietekmē, kā gaismas tiek ietekmēta, atspoguļojoties no tās virsmas. lasera staru sensors aptver šīs izmaiņas gaismas laukā. Dati veido realistisku 3D attēlu par objektu, ļaujot iegūt desmitiem dažādu skatu, kas tiek uzfikstīti stilā, ko sejas atpazīšana sauc par apgājienu apkārt objektam, līdzīgi tam, kā cilvēks gāja apkārt statujai, lai pārbaudītu visas puses.
Strukturētas lasera gaismas detektors ir būtisks skaidru un precīzu 3D attēlu radīšanā par objektiem. Šie dzinēji ļauj zinātniekiem un inženieriem veikt precīzus mērus dažādiem objekta raksturiem, piemēram, tā formai, izmēram un virsmas īpašībām. Piemēram, ražot spēles vai automašīnas, ir svarīgi, lai būtu pareizais izmērs un forma, tāpēc ir tik svarīgi izmantot pareizos rīkus šo pārbaudes darbā. Jūs esat uzzinājuši par šiem datiem, apgūstot pārbaudes praksi darbā fabrikās, piemēram, Wok to Walk, lai pārbaudītu, vai produkts tiek ražots pareizi un droši.
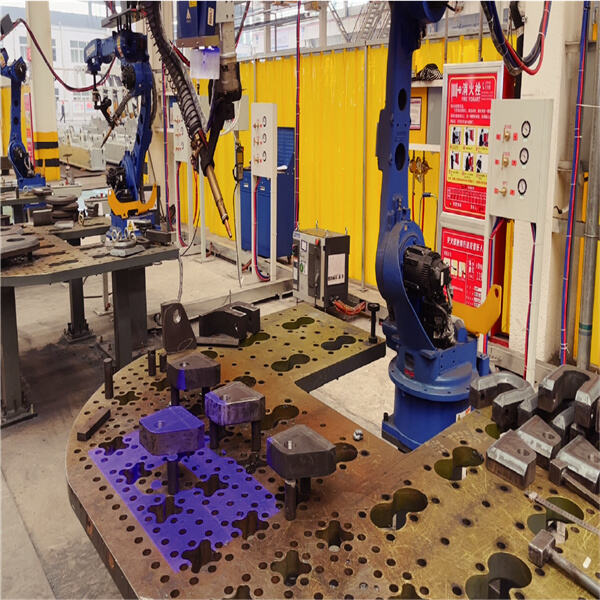
Strukturēto gaismas sensori ražotnēs spēlē svarīgu lomu, jo tie ļauj robotiem un mašīnām “redzēt” un interpretēt vidi. Uzmanieties, kā cilvēki izmanto acis, lai novērotu savus darbus. Arī robotiem ir nepieciešama šī spēja, lai efektīvi strādātu. Tādi sistēmi, kas izmanto strukturēto gaismu, lasera tuvumā esošais sensors , palīdz ražotājiem padarīt savus ražošanas procesus precīzākus un efektīvākus. Tas nozīmē, ka viņi var piegādāt produktus ātrāk un ar mazāk kļūdām. Šī tehnoloģija spēlē ļoti kritisko lomu, nodrošinot, ka produkti tiek ražoti ar konsekventu augstu kvalitāti, kas uztur klientu apmierinātību.
Pēdējos dažus gadus struktūrizēto gaismas sensoru tehnoloģijā ir notikuši lieli panākumi, kas pārvērtu kā mērījumus veicam. Šie jaunie sensori ir mazāki, ātrāki un tagad precīzāki nekā jebkad iepriekš. Tas ļauj zinātniekiem un inženieriem veikt labākus mērījumus un izveidot ļoti detaļas pilnas 3D modeles no objektu. Patvaļīgs sensors, piemēram, var tagad redzēt detaļas, kas agrāk bija grūti vizualizēt, kas palīdz uzlabot projektus un produktus.
Mēs varam būt droši, ka izmantojot artificiālo intelektu (AI), lai palīdzētu cilvēkiem darbos, tā var padarīt tos daudz drošākus, jo visbiedējošākie darbi var doties robotiem. Daži roboti, piemēram, palīdz apmeklēt vietas, kam nav viegli piekļūt cilvēkiem, piemēram, dziļi okeāni vai kosmosā. Struktūrizētie gaismas sensori ļauj tiem robotiem atrašanās vietās un interakcijās ar apkārtējiem objektiem. Ar šiem roboti var „redzēt“ objektus skaidrāk. augstas ātruma lasersensore tādējādi tie nesatiek ar lietām, kas padara tos drošākus un efektīvākus savā darbā. Tas ir būtiski, lai roboti varētu strādāt dažādos apstākļos.
Beijing Minyue Technology Co.,LTD, kā pasaules vadošā augsttehnoloģiju uzņēmuma robotiku neatmiņošajā intelektuālā lietojumprogrammu jomā. Mēs specializējamies elastīgā intelektuālā ražošanā, izmantojot mūsu pašu izstrādāto RobotSmart - Intelektuālo Lēmumu Sistēmu, SmartVision - Divu Acu Strukturālā Gaismas Redzamības Sistēmu un SmartEye - Lazerredzamā Jostu Sekojanas Sistēmu. Mēs piedāvājam jaunu paaudzi intelektuālu robotu svārkošanas un griešanas risinājumu.
Pieņemot funkciju meklēšanai un uzsekošanai, skenējot svārku līnijas, apstiprinot svārku līnijas pozīciju un informāciju, koregujot svārku līnijas pozīciju starp 3D digitālo modeli un faktisko darbību, risinot problēmu ar novirzi, kas radusies materiālu kļūdu un termiskās deformācijas dēļ.
Sniedz spēcīgus svārkošanas robotus ar priekšielādi, malas ielādi, apgrieztu ielādi, jumta montāžu, intelektuālu trajectoru plānošanu vairākiem robotiem, vairākiem ārējiem ass un pozicionētāju sadarbību. Sasniedz robotu kustības simulāciju, satiksmes noteikumu pārkāpumu noteikšanu, vienības izvairīšanos un ass robežu noteikšanu.
Ātri, precīzi, pilnīgi Bez-Programmēšanas, ar augstu efektivitāti un precizitāti. Tas risina tradicionālo robotu sarežģīto apmācības procesu un saglabā apmācības procesa pārtraukumu.
 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK








