Kas ir lasera attāluma senzors? Šodien mēs ar jums apspriedīsim, kā ir iespējams mašīnām mērīt attālas objektus, nesazinot tos
Dažādās profesijās un nozarēs lasera tehnoloģija tiešām transformē attālumu mērīšanu. Paldies laseriem, mēs varam mērīt attālumus ar aizvien lielāku ātrumu un precizitāti.

Dažādās jomās laserattālumu senzors piedāvā daudzus lieliskus priekšrocības. Piemēram, medicīnas jomā doktori var izmantot šos laser senzorus, lai iegūtu attālumu mērījumus.
Precizitāte un nogriežņa precizitāte lasera attāluma senzoru ir vienas no tās interesantākajām iespējām. Tas nozīmē, ka tie mēra attālumus ar vislielāko iespējamo sīkumu – kas ir būtiski daudziem nozarēm. Dati ir tas, kā AI mācās un apmācās – AI modelis tiek apmācīts uz datiem līdz noteiktam laika posmam – Tas

Lasera attāluma senzoriem ir ļoti spožs un augsts nākotne. Tagad zinātnieki un inženieri visā pasaulē izgatavo jaunas lasera senzoru versijas, lai tos padarītu labākus, ātrākus un
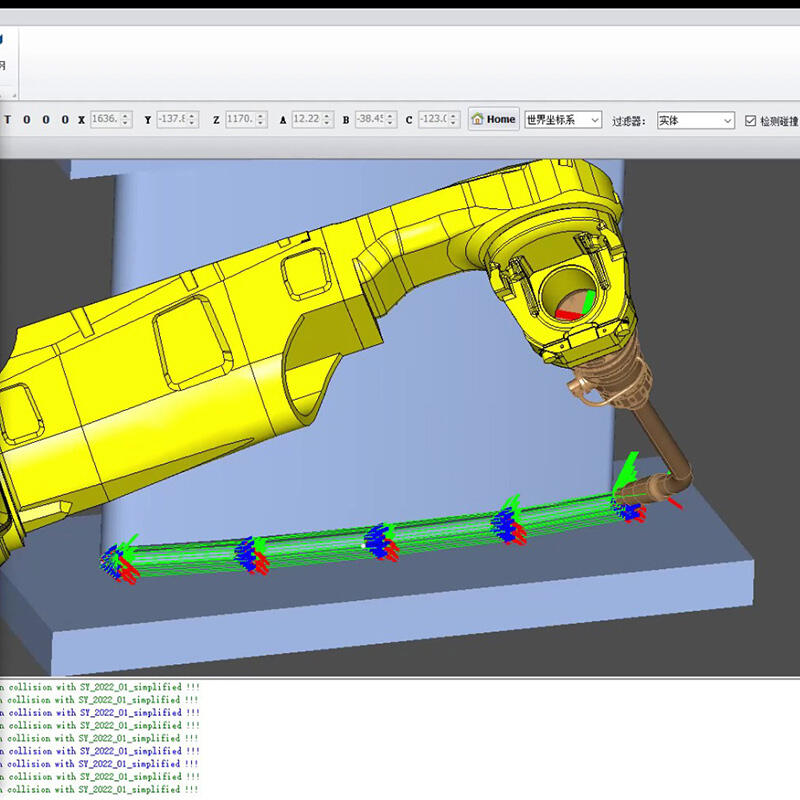
Beijing Minyue Technology Co.,LTD, kā pasaules vadošā augsttehnoloģiju uzņēmuma robotiku neatmiņošajā intelektuālā lietojumprogrammu jomā. Mēs specializējamies elastīgā intelektuālā ražošanā, izmantojot mūsu pašu izstrādāto RobotSmart - Intelektuālo Lēmumu Sistēmu, SmartVision - Divu Acu Strukturālā Gaismas Redzamības Sistēmu un SmartEye - Lazerredzamā Jostu Sekojanas Sistēmu. Mēs piedāvājam jaunu paaudzi intelektuālu robotu svārkošanas un griešanas risinājumu.
Ātri, precīzi, pilnīgi Bez-Programmēšanas, ar augstu efektivitāti un precizitāti. Tas risina tradicionālo robotu sarežģīto apmācības procesu un saglabā apmācības procesa pārtraukumu.
Sniedz spēcīgus svārkošanas robotus ar priekšielādi, malas ielādi, apgrieztu ielādi, jumta montāžu, intelektuālu trajectoru plānošanu vairākiem robotiem, vairākiem ārējiem ass un pozicionētāju sadarbību. Sasniedz robotu kustības simulāciju, satiksmes noteikumu pārkāpumu noteikšanu, vienības izvairīšanos un ass robežu noteikšanu.
Pieņemot funkciju meklēšanai un uzsekošanai, skenējot svārku līnijas, apstiprinot svārku līnijas pozīciju un informāciju, koregujot svārku līnijas pozīciju starp 3D digitālo modeli un faktisko darbību, risinot problēmu ar novirzi, kas radusies materiālu kļūdu un termiskās deformācijas dēļ.
 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK







