Kad runājam par dzelzs struktūru sastādīšanu, varsēšanas roboti ir ļoti noderīgi. Tie darbojas kā mini mašīnu palīgi, kas var veikt darbu ātri un precīzi. Strādājot ar dzelzi, aplūkstiet, kā šie brīnišķie roboti padara to vieglāku un labāku.
Dzelzs struktūru varsēšana jāveic ar augstu precizitāti. Palieliniet šo skatu un stāstiet savu stāstu, ņemot vērā to, kas notiek jūsu auditorijas prātos. Izmantojot MINYUE, svarsrobot mēs varam garantēt katras varsējuma precizitāti. Tādi roboti ir programmēti, lai veiktu vienkāršus uzdevumus, un mēs varam būt droši, ka roboti veido lieliskas varsējumus reizi pa reizei. Turklāt tas samazina laika zaudējumus, mazina kļūdas un problēmas, nozīmīgi vienkāršojot un nodrošinot varsēšanu.
Mēs spējam darboties ātrāk un izpildīt vairāk uzdevumus, izmantojot svaidīšanas robotus. Šie roboti ir dizainēti, lai kustos augstās ātruma apjomos un strādātu efektīvā veidā, ļaujot mums veikt daudz vairāk uzdevumu mazāk laikā nekā tas iespējams pašlaik. Tas ir īpaši noderīgi, kad ir ierobežots laiks un mums jāuztur projektu grafiks. Vēl labāk, svaidīšanas roboti var strādāt nepārtraukti bez atpūtas nepieciešamības, kas nozīmē, ka mēs varam turpināt darbu bez pārtraukumiem. Ražošanas spēja var tikt būtiski palielināta, un mēs varam sasniegt projektu termiņus.
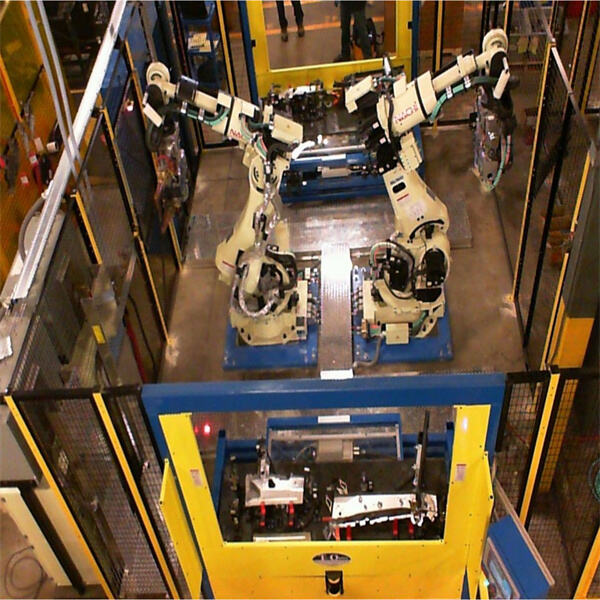
Svārstības roboti ir specifiskas tehnoloģijas, lai izveidotu drošus svārstību apvienojumus, kas ir konsekventi un atkārtoti. Tas nozīmē, ka katrs svārstību apvienojums būs spēcīgs un uzticams, kas ir kritiski ķermeņa spēka un drošības dēļ. Kvalitāte ar tradicionālajām svārstības metodes var mainīties atkarībā no svārstītāja prasmju vai darba vidiem. Tādu problēmu novēršanai var izmantot MINYUE. automātisks svārkošanas robots un pārliecinoties, ka visas svārstības ir augstas kvalitātes un konsekventas, izmantojot robotu svārstīšanu. Tas uzlabo celma struktūru integritāti, ko mēs veidojam.
Tomēr, dzelzs ir bīstama, īpaši, kad to svārstī atkārtoti, kas prasa siltumu un citas spārņu veidus. Tomēr šāda veida iekārtas palīdz darbiniekiem turēties tālu no tā. MINYUE. vārdejošie roboti pazudināšanai var darboties bīstamās vides un veikt uzdevumus, kas ir pārāk bīstami cilvēkiem. Kad mēs lietojam svārstīšanas robotus savos dzelzs projektos, mēs nozīmīgi samazinām negadību un ievainojumu risku, radot daudz drošāku darba vietu visiem iesaistītajiem. Tas atvieglina strādnieku koncentrāciju uz darbu, neuztraucot viņu drošības bažām.

Piedodot mums iespēju strādāt labāk un ātrāk, svārstīšanas roboti var arī ietaupīt mums daudz naudas. Ja strādājam ātrāk un efektīvāk, mēs varam samazināt darba izmaksas un stiprināt mūsu kopējo peļņas normu. MINYUE automatizēts svārkošanas robots uzlabot ražīgumu, samazināt zaudējumus un būt ekonomiskiem resursiem. Tas nozīmē, ka tiek izmantoti mazāk materiāli, kas citādi varētu būt zaudēti, un tādējādi tiek iztērēta mazāk naudas par tiem. Robotu svārstīšana ļauj mums ilgtermiņā ietaupīt naudu un labāk pārvaldīt sevi un projektus, kurus veicam.
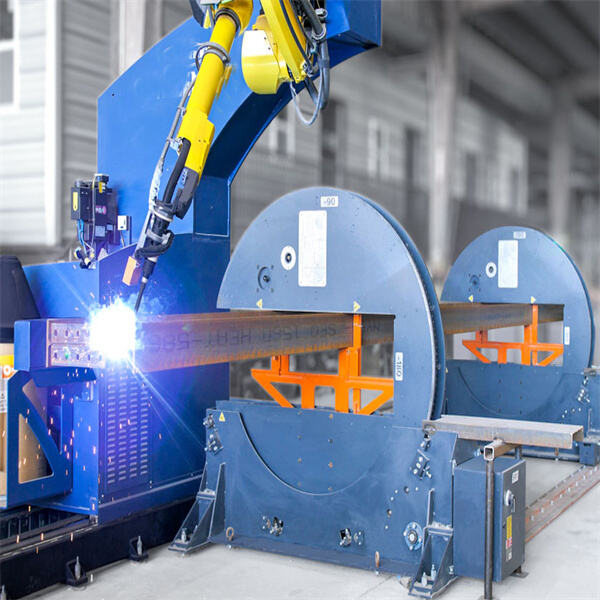
Sniedz spēcīgus svārkošanas robotus ar priekšielādi, malas ielādi, apgrieztu ielādi, jumta montāžu, intelektuālu trajectoru plānošanu vairākiem robotiem, vairākiem ārējiem ass un pozicionētāju sadarbību. Sasniedz robotu kustības simulāciju, satiksmes noteikumu pārkāpumu noteikšanu, vienības izvairīšanos un ass robežu noteikšanu.
Pieņemot funkciju meklēšanai un uzsekošanai, skenējot svārku līnijas, apstiprinot svārku līnijas pozīciju un informāciju, koregujot svārku līnijas pozīciju starp 3D digitālo modeli un faktisko darbību, risinot problēmu ar novirzi, kas radusies materiālu kļūdu un termiskās deformācijas dēļ.
Beijing Minyue Technology Co.,LTD, kā pasaules vadošā augsttehnoloģiju uzņēmuma robotiku neatmiņošajā intelektuālā lietojumprogrammu jomā. Mēs specializējamies elastīgā intelektuālā ražošanā, izmantojot mūsu pašu izstrādāto RobotSmart - Intelektuālo Lēmumu Sistēmu, SmartVision - Divu Acu Strukturālā Gaismas Redzamības Sistēmu un SmartEye - Lazerredzamā Jostu Sekojanas Sistēmu. Mēs piedāvājam jaunu paaudzi intelektuālu robotu svārkošanas un griešanas risinājumu.
Ātri, precīzi, pilnīgi Bez-Programmēšanas, ar augstu efektivitāti un precizitāti. Tas risina tradicionālo robotu sarežģīto apmācības procesu un saglabā apmācības procesa pārtraukumu.
 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK








