Kas yra laserinis atstumo jutiklis? Šiandien su jumis aptarsime, kaip mašinos gali matuoti toli esančius objektus be tiesioginio matavimo
Keliuose profesiniuose veiksmuose ir pramonėje, lazerinė technologija tikrai transformuoja atstumų matymą. Dėka laserių, mes galime matuoti atstumus vis didesniu greičiu ir tikslumu.

Skirtingose srityse, lazerinis atstumų jutiklis turi daugelio puikių pranašumų. Pavyzdžiui, medicinos srityje gydytojai gali naudoti šiuos lazerinius jutiklius, kad surinktų atstumų matavimus.
Tikslumas ir išsamumas, kurie yra būtinieji laserinių atstumo jutiklių savybės, yra vieni iš jų giliausiai įspūdingiausių galimybių. Tai reiškia, kad jie matuoja atstumus su didžiausiu galimu detalesumu – kažkas, kas jų yra kruopščiai svarbu daugeliui pramonės šakų. Duomenys yra tai, kaip dirba ir mokosi AI – AI modelis treniruojamas naudojant duomenis iki tam tikro laiko momento – Jis

Lazerinių atstumo jutiklių ateitis yra labai žaista ir pažadanti. Dabar mokslininkai ir inžinieriai visame pasaulyje išrado naujas versijas laserinių jutiklių, kad juos padaryti geriau, greičiau, ir
Beijing Minyue Technology Co.,LTD, kaip pasaulio lydere besijaučiančio aukštos technologijos įmonės pramoninių robotų neįmokomosios inteligentaus taikymo srityje. Specializuojamės flexibiliojo inteligento gamyboje su mūsų savarankiškai sukurtu RobotSmart - Inteligentinis sprendimų priėmimo sistema, SmartVision - Dviejų akinių struktūrizuoto šviesos vizija sistema, ir SmartEye - Laserinė vizija jūros sekimo sistema. Teikia naujausią kartą inteligentinių robotų suvilkimo ir pjovimo sprendimus.
Greita, tikslu, visiškai Be-Programavimo, aukšta efektyvumas ir aukšta tikslumas. Tai išspręsta trisčio mokymo proceso tradicinių robotų problema ir sumažina mokymosi proceso dėltoją.
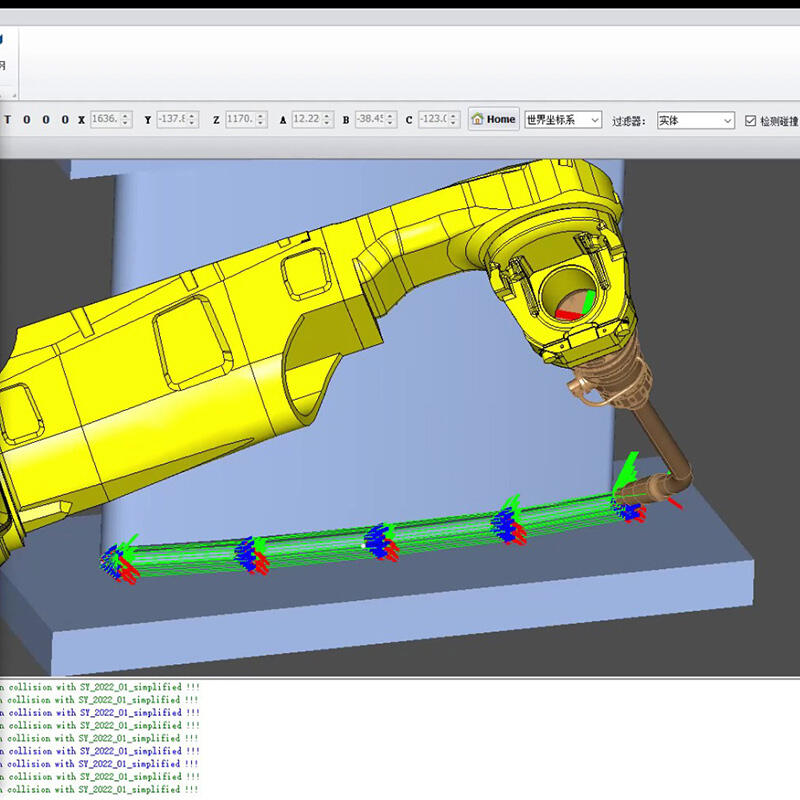
Siūloma galinga varomųjų robotų priešinė įkrovos, kraštine įkrovos, atvirkštinės įkrovos, jumties montavimo, gebančių inteligentiniam kelio planavimui keliems robotams, keliems išoriniams aksiams ir pozicionieriams bendradarbiaujant. Galima realizuoti robotų judesio simuliaciją, sutrikimų aptikimą, vienatvičių išvengimą ir aksių ribų aptikimą.
Naudojant funkcijas, skirtas rasti ir sekti, skenuojant šovinius sutriktimus, patvirtinti šovinių sutriktimų vietą ir informaciją, ištaisyti šovinių sutriktimų vietą tarp 3D skaitmeninio modelio brėžinio ir faktinio darbo gabalo, bei išspręsti problemą dėl nelygiaverčių šovių dėl įvesties medžiagų klaidų ir šiluminės deformacijos.
 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK







