Kai kalbame apie geležies konstrukcijų montavimą, suvaržymo robotai rodosi ypač naudingi. Jie veikia kaip mini mechaniniai pagalbininkai, gali atlikti darbą greitai ir tiksliai. Dirbdami su geležiu, pažiūrime, kaip šie nuostabūs robotai padaro tai lengviau ir geriau.
Geležies konstrukcijų suvaržymas turi būti atliekamas aukšta tikslumu. Patobulinkite šį požiūrį ir pasakokite savo istoriją, atsižvelgdami į tai, ką galvoja jūsų auditorija. Naudojant MINYUE varno robotui galime užtikrinti kiekvieno suvaržymo tikslumą. Tokie robotai programuojami atlikti paprastus užduotis, ir mes galime būti tikri, kad robotai kartu po karto sukuria puikius suvaržymus. Be laiko taupymo, jie sumažina klaidas ir problemų, didelio dydžio supaprastindami ir užtikrinant suvaržymą.
Naudojant sudėliavimo robotus, mes galime dirbti greičiau ir atlikti daugiau darbo. Šie robotai yra sukonstruoti judėti aukštais greičiais ir dirbti efektyviai, leidžiant mums atlikti daug užduočių mažesniu laiku nei dabar yra galima. Tai ypač naudinga tuo atveju, kai laiko nėra ir reikia išlaikyti projektų tvarkaraštį. Dar geresnis tas, kad sudėliavimo robotai gali dirbti be pertraukos, net neprilygstant, kad reikalingas atpūta, todėl mes galime dirbti toliau be sustojimų. Gamybos pajėgumai gali būti padidinti dideliu mastu, o mes galime įsivydyti į projektų terminus.
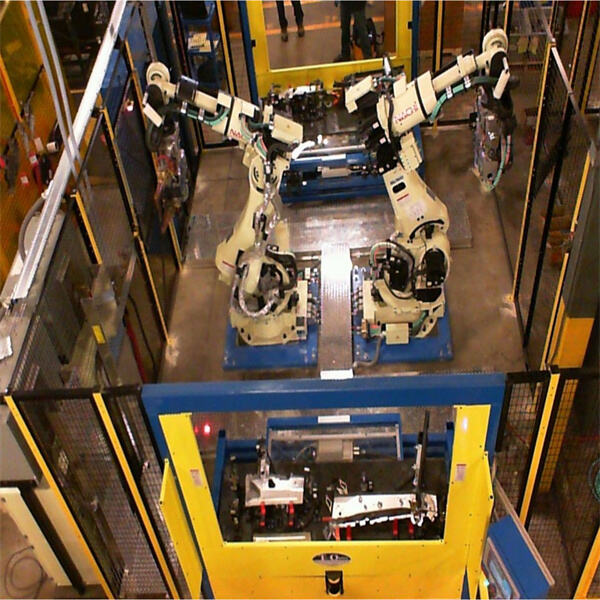
Sudėliavimo robotai turi specifišką technologiją, skirtą kurti galingus ir nuolatinius sutinkimus. Tai reiškia, kad kiekvienas sutinkimas bus stiprus ir patikimas, kas yra labai svarbu geležies konstrukcijų stiprumui ir saugumui. Su tradiciniais sudėliavimo metodais kokybė gali kinti priklausomai nuo sudėliuotojo patirties ar darbo aplinkos. Tokių problemų galima išvengti naudojant MINYUE automatinis svaidymo robotas ir patvirtinus, kad visi sutinkimai yra aukštos kokybės ir nuolatiniai naudojant robotinį sudėliavimą. Tai pagerina statomių geležies konstrukcijų integritetą.
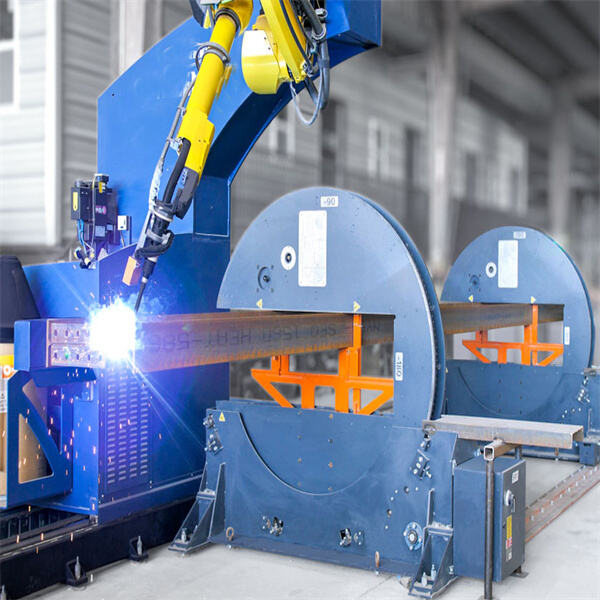
Vis dėlto, geležis yra pavojingas, ypač kartotiniame sudėliavime, kuriam reikia šilumos ir kitokių spalvų. Tačiau tokie įrenginiai padeda dirbantiems būti nuo to atitolę. MINYUE suvaržymo robotai parduodami gali dirbti pavojinguose aplinkose ir atlikti užduotis, kurios yra per pavojingos žmonėms. Naudojant suvaržymo robotus mūsų geležies projektuose, esminiu būdu sumažiname nelaimingų atsitikimų ir sužeistių riziką, sukurdami saugesnę darbo vietą visiems dalyvavusiems. Tai leidžia darbuotojams koncentruotis į savo darbą, nesunkiojau neramindamiesi dėl savo saugumo.

Be to, kad galime geriau ir greičiau dirbti naudodami suvaržymo robotus, tai taip pat gali užtikrinti didelę pinigų šventį. Jei dirbame greičiau ir kokybiškiau, galime sumažinti darbo išlaidas ir stiprinti mūsų bendrą pelno normą. MINYUE automatinis suvienydymo robotas patobulintų produktyvumą, sumažintų nuostolių ir būtų ekonomiškesnis išteklių vartojimui. Tai reiškia, kad bus naudojama mažiau medžiagų, kurios kitaip galėtų būti išmetamos, o todėl joms bus skiriamos mažesnės išlaidos. Robotinio suvaržymo pagalba galime taupyti pinigus ilgalaikiu laiku ir geriau valdyti save ir projektus, kuriuose dirbame.
Siūloma galinga varomųjų robotų priešinė įkrovos, kraštine įkrovos, atvirkštinės įkrovos, jumties montavimo, gebančių inteligentiniam kelio planavimui keliems robotams, keliems išoriniams aksiams ir pozicionieriams bendradarbiaujant. Galima realizuoti robotų judesio simuliaciją, sutrikimų aptikimą, vienatvičių išvengimą ir aksių ribų aptikimą.
Naudojant funkcijas, skirtas rasti ir sekti, skenuojant šovinius sutriktimus, patvirtinti šovinių sutriktimų vietą ir informaciją, ištaisyti šovinių sutriktimų vietą tarp 3D skaitmeninio modelio brėžinio ir faktinio darbo gabalo, bei išspręsti problemą dėl nelygiaverčių šovių dėl įvesties medžiagų klaidų ir šiluminės deformacijos.
Beijing Minyue Technology Co.,LTD, kaip pasaulio lydere besijaučiančio aukštos technologijos įmonės pramoninių robotų neįmokomosios inteligentaus taikymo srityje. Specializuojamės flexibiliojo inteligento gamyboje su mūsų savarankiškai sukurtu RobotSmart - Inteligentinis sprendimų priėmimo sistema, SmartVision - Dviejų akinių struktūrizuoto šviesos vizija sistema, ir SmartEye - Laserinė vizija jūros sekimo sistema. Teikia naujausią kartą inteligentinių robotų suvilkimo ir pjovimo sprendimus.
Greita, tikslu, visiškai Be-Programavimo, aukšta efektyvumas ir aukšta tikslumas. Tai išspręsta trisčio mokymo proceso tradicinių robotų problema ir sumažina mokymosi proceso dėltoją.
 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK








