Suvienydinimas naudojant Kuka robotą ir jungties stebėjimo jutiklį gali pagerinti suvienydinus. Jungties Stebėjimo Jutiklis - MINYUE Fanuc Robot šovinių sekimo jutiklis naudojamas norint nustatyti liniją, kuria jungiamos metalinės dalys. Tai užtikrina, kad kiekvienas suvaržymas būtų atliktas labai tiksliai. Tai ypač svarbu vietose, tokiuose kaip automobilių ir lėktuvų gamyklėse, kur stiprieji suvaržymai padeda išlaikyti viską saugiu ir gerai veikiančiu.
Pagrindinis elementas Kuka Robot, naudojamas giminant stiprius produktus, naudojant jo nuosavybę suvaržio stebėjimo senzoriu. Robotas gali aptikti pokytis varno linijoje ir pritaikyti savo veiklą, kad užtikrintų idealų varnį kiekvieną kartą. Tai reiškia, kad varniai yra stiprūs ir patikimi ir atitinka aukščiausias kokybės standartus.
Suvaržio stebėjimo senzorius taip pat paaukštinamas Kuka Robot darbą. Su šia MINYUE Yaskawa Robot šovinių sekimo jutiklis technologija gamintojai turi galimybę automatizuoti varno procesą. Tai reiškia, kad robotas gali padėti sukurti daugiau dalių mažiau laiko. Jis užtaisa darbuotojus ir leidžia visam gamybos procesui veikti glodžiau.
Jungties stebėjimo jutiklis naudojamas su Kuka robotu, gausite idealų ir vienodą suvienydinimo liniją. MINYUE ABB Roboto šovinio sekimo jutiklis galima kompensuoti bet kokią linijos kintamumą, taip užtikrinant, kad suvienydinimas atrodytų tvarkingai, be klaidų. Tokia tikslumo lygmuo gali būti sunku pasiekti rankiniu suvienydinimu, todėl Kuka robotas yra tokio vertingo atlikdami tikslius suvienydinus.

Gamybininkai nori puikios rezultatos naudodami Kuka roboto jungties stebėjimo jutiklio technologiją. Kadangi robotas yra apgaubtas jutikliais, kurie gali aptikti nesupratimą suvienydinimo linijoje, MINYUE sudėtingas išlenktas šovinio sekimo jutiklis užtikrina, kad kiekvienas suvienydinimas būtų atliktas teisingai. Tai daro suvienydinus, kurie yra stiprūs, ilgalaikiai ir be trūkumų.
Greita, tikslu, visiškai Be-Programavimo, aukšta efektyvumas ir aukšta tikslumas. Tai išspręsta trisčio mokymo proceso tradicinių robotų problema ir sumažina mokymosi proceso dėltoją.
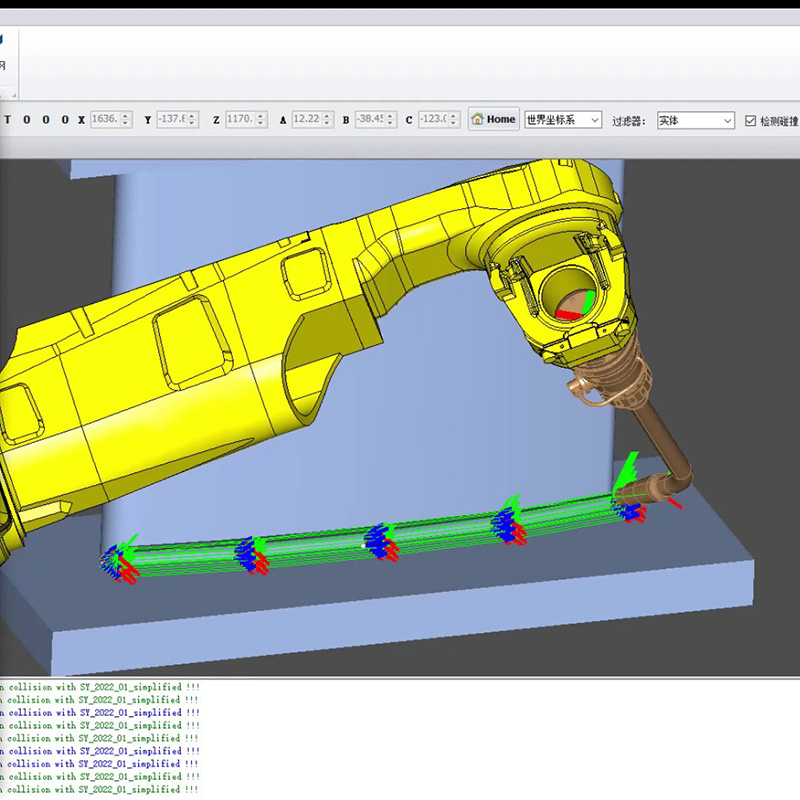
Naudojant funkcijas, skirtas rasti ir sekti, skenuojant šovinius sutriktimus, patvirtinti šovinių sutriktimų vietą ir informaciją, ištaisyti šovinių sutriktimų vietą tarp 3D skaitmeninio modelio brėžinio ir faktinio darbo gabalo, bei išspręsti problemą dėl nelygiaverčių šovių dėl įvesties medžiagų klaidų ir šiluminės deformacijos.
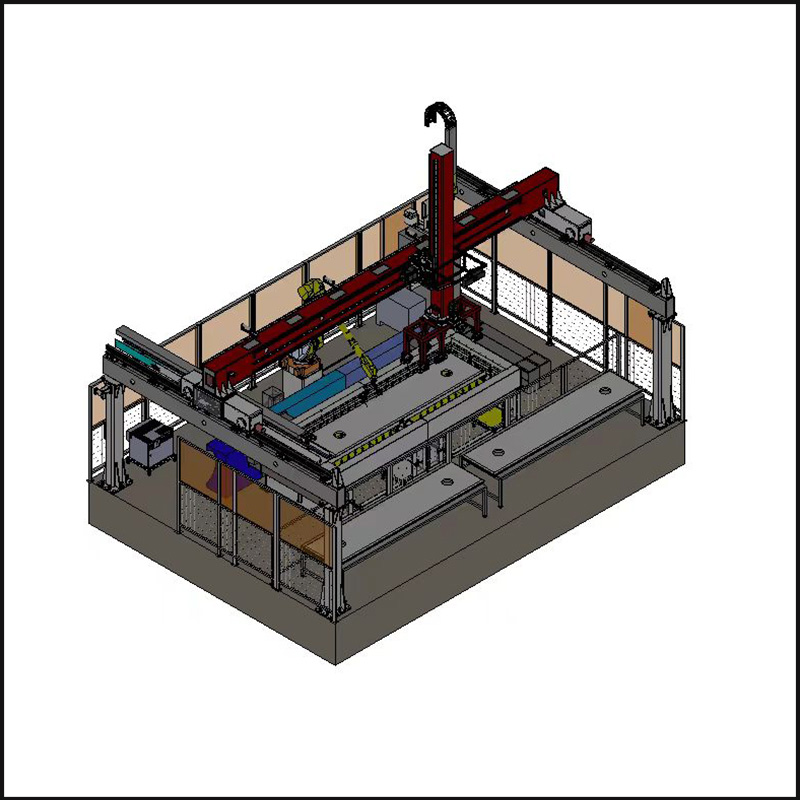
Siūloma galinga varomųjų robotų priešinė įkrovos, kraštine įkrovos, atvirkštinės įkrovos, jumties montavimo, gebančių inteligentiniam kelio planavimui keliems robotams, keliems išoriniams aksiams ir pozicionieriams bendradarbiaujant. Galima realizuoti robotų judesio simuliaciją, sutrikimų aptikimą, vienatvičių išvengimą ir aksių ribų aptikimą.
Beijing Minyue Technology Co.,LTD, kaip pasaulio lydere besijaučiančio aukštos technologijos įmonės pramoninių robotų neįmokomosios inteligentaus taikymo srityje. Specializuojamės flexibiliojo inteligento gamyboje su mūsų savarankiškai sukurtu RobotSmart - Inteligentinis sprendimų priėmimo sistema, SmartVision - Dviejų akinių struktūrizuoto šviesos vizija sistema, ir SmartEye - Laserinė vizija jūros sekimo sistema. Teikia naujausią kartą inteligentinių robotų suvilkimo ir pjovimo sprendimus.
 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK