Hoc ingenium parvulum vocatur sensor triangulationis laser et melius reddit potentiam machinarum et robotarum. Itaque in hoc articulo, nos inspectabimus istos sensores, qualiter operantur et quod est eorum officium in variis occupationibus et industriis. Sensor triangulationis laser utitur laseribus ad determinandum distantiam objecti a se ipso. Dicamus quod sensor emitteret fasciculum luminis laser versus objectum. Materialis operit objectum et reflectit fasciculum laser retrorsum in sensorem. robor laser conglutinatio machina deinde horologium computat tempus quod sumitur illi laseri ut pereat ad rem et retrorsum. Hoc fecit posse sensorem calculare distantiam ad rem. Haec informatio est valde utilis quia permitit robotibus et machinis cognoscere locum rerum et quemadmodum recte cum eis interagere.
Quid sunt opera vel actiones sensorum triangulationis laser in faciendo res facilius ad perveniendum ad successum in operibus sicut manufactura? Unus modus magnus: per faciendum mensuras accurateiores. Quando automatizatio coniunctionis laser machainae producta faciunt, easdem esse praecise de magnitudinibus et formis oportet. Sensus triangulationis laser adhibentur ut omnia exacte recta sint, ut producta bene exeant. Haec praecisio tempus et pecuniam servare potest per minuendos errores et curandos ut omnia a principio recte perficiantur.
Sensus triangulationis laser in arte robotica quoque valde utilia sunt. In robotica sensus adhibemus ut robotorum conscientiam situational meliorem praebeamus. Hoc roboto facultatem meliorem navigandi circumstantias suas et cum rebus interagentis tribuit. Si, exempli gratia, robot in horreo operatur, usum facere potest sensuum triangulationis laser ut collisiones vitet et pacis tollat sine systema robotis surgens laser . Deinde, cum varias operationes exsequuntur, hoc facit ut robot operentur efficientius et accuratius.
Control qualitatis fabricationis est pars essentialis productionis quae certificat producta recte confici et ad certum standardem pertinere. In processibus controlis qualitatis, utrum omnia producta recte conficiantur inveniendi causa, sensus triangulationis laser efficax solutio esse possunt. Exempli gratia, hi sensor fascei laser possunt mensuram producti quantificare et certificare id rectam magnitudinem habere. Hoc errores initio deprehendit qui corrigi possunt antequam productum perficiatur. Sensus triangulationis laser pro controllo qualitatis vitant defectus et certificant tantummodo recta producta clientibus mittantur.
Futurum Technologiae Sensuum Triangulationis Laser Quod technologia progressum facit, hi sensor proximitatis laser erit tantummodo utilior in automatione et plus. Nova et excitantia modi utendi his quae converterent machinas et robotas sapientiores et multo efficientiores. Exempli gratia, futura automobilia sine conductoribus possunt usum facere sensorum triangulationis laser ad deprehendendum et vitandum obstacula. Eadem quoque possunt adhiberi in instrumentis medicalibus ad iuvandos medicos accuratius et tutius operandum. Usus harum sensorum est prope infinitus!
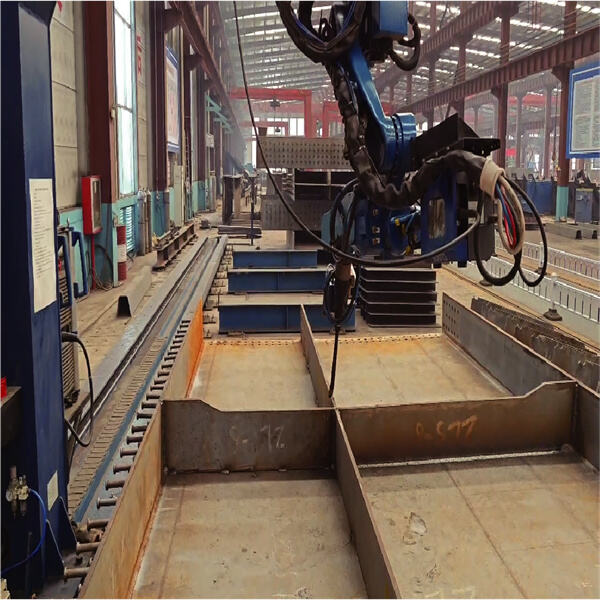
Beijing Minyue Technology Co.,LTD, ut leading enterprise technologicum in applicatione non-manualis roboticae industrialis. Specializamur in fabrica intelligentia flexibili cum systemate nostro proprio RobotSmart - Systema Decisionum Intelligentium, SmartVision - Systema Visionis Binochali Structurae Luminis, et SmartEye - Systema Visionis Laser Trajectus Seguendi. Offertur nova generatio solutionum roboticarum intelligentium pro fusione et sectura.
Praebet potentem praecipuum robotorum pro fusione, onusta frontali, laterali, inverso, montatura gantrii, planificatio itineris intelligentis pro multis robotis, multibus axibus externis, et positionario cooperando opere. Realizat simulationem motus robotici, detegit collisiones, vitat singularitates et deprehendit limites axium.
Velox, accuratus, prorsus Sine-Programmatione, alta efficentia et alta praecisio. Solvit complicatum processum doctrinae robotorum traditionalium et parcat temponi immobilitatis doctrinae.
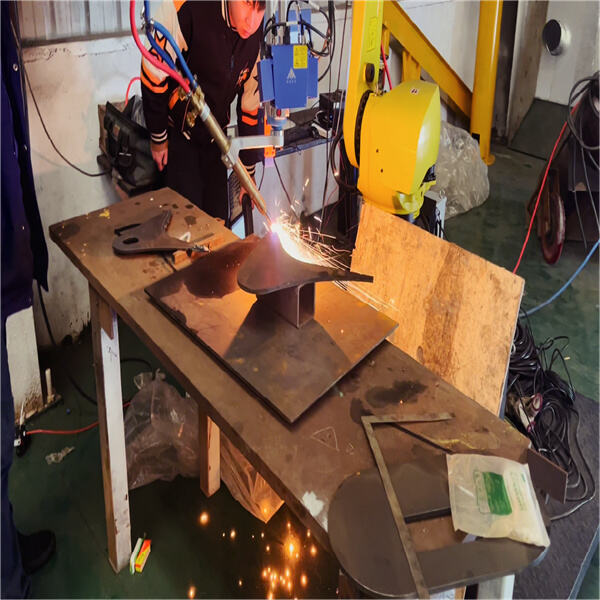
Adoptando functionem inveniendi et sequendi, scannandi fissuram fusionis, confirmandi positionem et informationem fissurae fusiva, corrigendi positionem fissurae fusionis inter disegnum digitalis 3D et opus reale, et solvendi problemata fissurae praeiudicantis propter errorem materialium introeuntium et deformationem thermicam.
 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK








