Quo exempli gratia, sensus subsequentes congiis ad fusionem efficiunt disposita automatis industriae quae operarios iuvant ut congruam aligmentum ad fusionem servent. In magnis officinis, hi sensus partem valde necessariam habent, cum multi diversi producti cotidie conficiantur. Accipe contemplationem propinquam et investiga plura de his utilisima instrumentis.
MINYUE sensus subsequentes congiis ad fusionem necnon sensoris sequendi suturae laser possunt visualizari tamquam parvi adjutores qui iuxta stant et certum faciunt ut materiae manent in loco dum funduntur. Hi [sagacia instrumenta] observant ubi partes sunt et operarios docent si omnia bene procedunt, utendo alta technica discentia machinarum. Est quasi amicus qui iuxta te stat dum operaris, dicens tibi si erras aut non.
Uti sensoribus MINYUE seguendi iuncturam solder et sensōr tracīng līneae in fabbris multa praesidia habet. Unum magnum praesidium est quod hic typus sensorum iuvat operarios iterum probare ut recte componant res, quod tempus et pecuniam servat in longo tempore. Recte conectere res minimizat potentia repetendi opus, quod potest esse valde onerosum. Hi sensores etiam certi faciunt ut objectum conflatum sit tutum et robustum. Hoc est praecipue necessarium in locis ubi producta finalia debent esse fortia et fida, sicut in structura aut machinis fabricationis gravium.

Sensorem subsequentium contextuum vel MINYUE sensorius automatus tractandi fusi adjuvant homines ut celerius et accurate operentur. Ei certum faciunt ut partes quae conglutinantur sint in recta positione per totum processum conglutinationis. Hoc permitit operaris ut citius opus suum perficiant, quoniam non debent sollicitari de partibus moventibus aut glissantibus. Praeterea, hi sensus certum faciunt ut conglutinationes recte locentur et formentur. Hoc est necessarium, quod confirmat ut productum finale sit validum et securum ad usum. Exemplum: Rectae conglutinationes eas inter se iungunt recte, quod praevenit posse accidere vel defectus postea.
Delectio erroris in fabris: Usus sensorum secutorum articulorum conglutinatorum et sensūs praesidiī sulcī . Hi sensores sunt valde importantes in certificando quod producta quae conficiuntur sint perfecta et tuta hominibus. Iis adiuvant ad errata cognoscenda citius quam serius, quando illa in maiora problemata possint evolvere, tempus et pecuniam servantes. Cum operarii possint problemata cito cognoscere, eos cito solvere possunt. Societates summam qualitatem suorum productorum polliceri possunt et quod parata sint ad venditionem clientibus his sensoribus utentibus.

In futuro, sensus coniunctionis soderationis adhuc proficiscetur et magis magisque pretiosus erit tam operariis quam fabricis. Nunc, in progressu sunt nova sensa quae multo amplius facere poterunt, et citius et melius quam antea. Hoc significat quod operarii munia sua etiam melius perficere possunt, et maiorem probabilitatem habebunt quod omnia quae conficiunt sint perfecta. Multum speramus pro futuro novorum sensorum coniunctionis soderationis et non possimus expectare quid alia cum eis veniant.
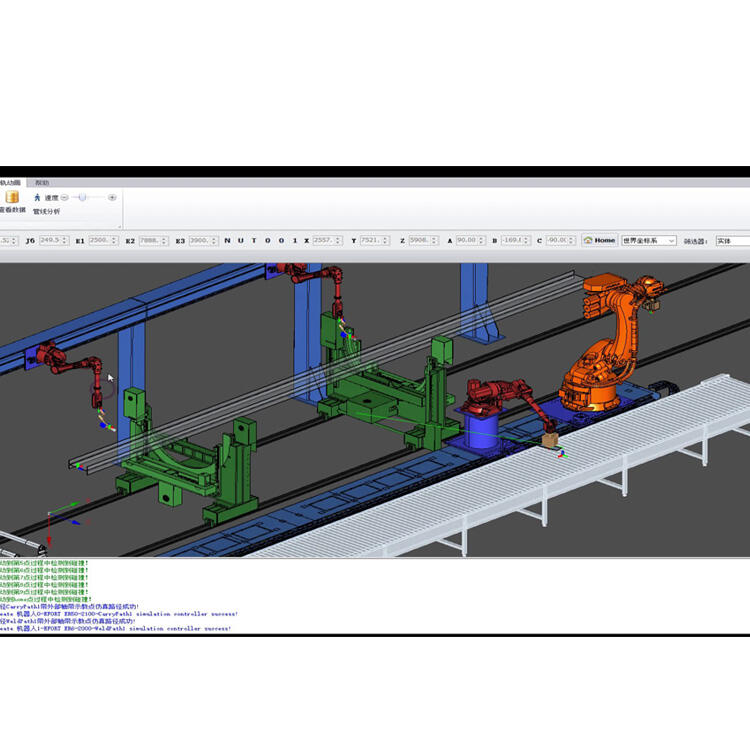
Adoptando functionem inveniendi et sequendi, scannandi fissuram fusionis, confirmandi positionem et informationem fissurae fusiva, corrigendi positionem fissurae fusionis inter disegnum digitalis 3D et opus reale, et solvendi problemata fissurae praeiudicantis propter errorem materialium introeuntium et deformationem thermicam.
Velox, accuratus, prorsus Sine-Programmatione, alta efficentia et alta praecisio. Solvit complicatum processum doctrinae robotorum traditionalium et parcat temponi immobilitatis doctrinae.
Beijing Minyue Technology Co.,LTD, ut leading enterprise technologicum in applicatione non-manualis roboticae industrialis. Specializamur in fabrica intelligentia flexibili cum systemate nostro proprio RobotSmart - Systema Decisionum Intelligentium, SmartVision - Systema Visionis Binochali Structurae Luminis, et SmartEye - Systema Visionis Laser Trajectus Seguendi. Offertur nova generatio solutionum roboticarum intelligentium pro fusione et sectura.
Praebet potentem praecipuum robotorum pro fusione, onusta frontali, laterali, inverso, montatura gantrii, planificatio itineris intelligentis pro multis robotis, multibus axibus externis, et positionario cooperando opere. Realizat simulationem motus robotici, detegit collisiones, vitat singularitates et deprehendit limites axium.
 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK







