Contextura cum robore Kuka & sensore praesidii contexturae potest meliores contexturas praebere. Sensor Praesidii Contexturae - MINYUE Sensor praesidii robotis Fanuc ad tracing lineae, per quam fragmenta metalli coniunguntur, utitur. Hoc certum facit ut omnis coniunctio diligenti executione pergat. Hoc multum valet in locis similibus fabbris automobilium et avium, ubi coniunctiones fortes iuvant omnia tutum et bene currentem conservare.
Elementum clavem robotis Kuka est producere robora producta usque cum proprio sensore tractus. Roboter potest mutationes in linea fusionis deprehendere et suam operationem adaptare ut perfectam fusionem semper certe faciat. Hoc significat fusiones esse fortes et fidatas et summam normam qualitatis consequi.
Sensorem tractus etiam celeritate laboris robotis Kuka augit. Cum hac MINYUE Sensor praesidii robotis Yaskawa technologia, fabricatores habent facultatem automatisare processum fusionis. Id significat robot posse adiuvare plura partes fieri minus tempore. Servat operarios et totum processum productionis fluentius agere.
Sensore praesidii contexturae utilis cum robore Kuka, consecutus es lineam contexturae perfectam et uniformem. MINYUE Sensor praesidii robotis ABB potest compensare pro qualibet variatione in linea, sic ut contextura nitida sit, sine erroribus. Hoc gradus praecisio potest esse difficile ad consequendum cum contextura manu facta, unde robur Kuka est tam pretiosum ad faciendum contexturas accurate.

Fabricatores volunt optima resultata cum technologia sensoris praesidii contexturae robotis Kuka. Quoniam robur est instructum cum sensoribus qui possunt deprehendere minimam variationem in linea contexturae, MINYUE sensorem pro secundis curvarum complexarum certificatur quod omnis contextura recte fit. Propterea, reddit contexturas quae sunt fortes, diuturnae, et sine defectibus.
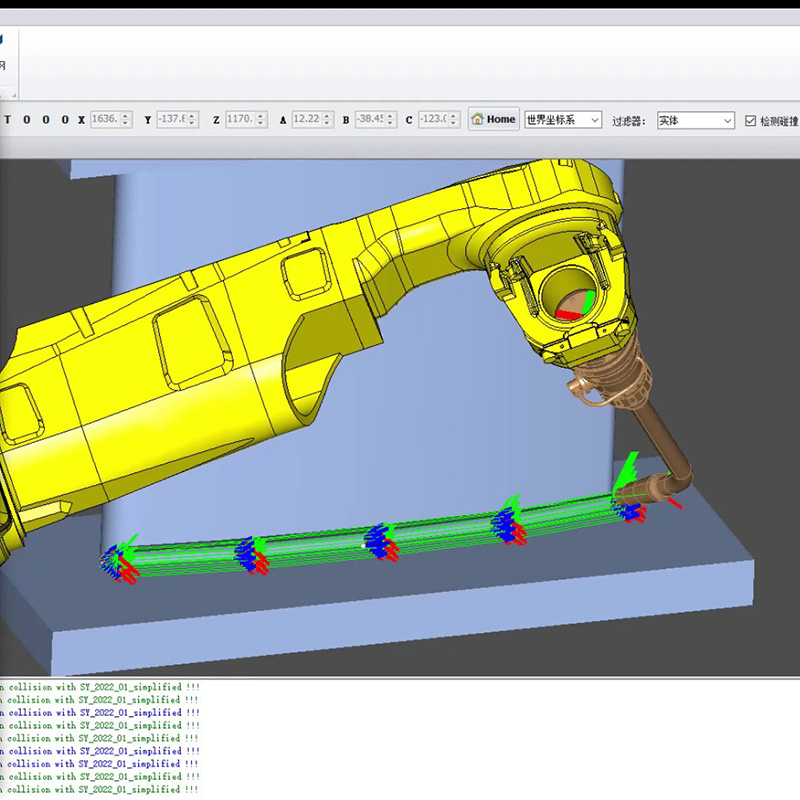
Velox, accuratus, prorsus Sine-Programmatione, alta efficentia et alta praecisio. Solvit complicatum processum doctrinae robotorum traditionalium et parcat temponi immobilitatis doctrinae.
Adoptando functionem inveniendi et sequendi, scannandi fissuram fusionis, confirmandi positionem et informationem fissurae fusiva, corrigendi positionem fissurae fusionis inter disegnum digitalis 3D et opus reale, et solvendi problemata fissurae praeiudicantis propter errorem materialium introeuntium et deformationem thermicam.
Praebet potentem praecipuum robotorum pro fusione, onusta frontali, laterali, inverso, montatura gantrii, planificatio itineris intelligentis pro multis robotis, multibus axibus externis, et positionario cooperando opere. Realizat simulationem motus robotici, detegit collisiones, vitat singularitates et deprehendit limites axium.
Beijing Minyue Technology Co.,LTD, ut leading enterprise technologicum in applicatione non-manualis roboticae industrialis. Specializamur in fabrica intelligentia flexibili cum systemate nostro proprio RobotSmart - Systema Decisionum Intelligentium, SmartVision - Systema Visionis Binochali Structurae Luminis, et SmartEye - Systema Visionis Laser Trajectus Seguendi. Offertur nova generatio solutionum roboticarum intelligentium pro fusione et sectura.
 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK