Бұл қуанышты құрал лазер триангуляция сенсоры деп аталады және ол машиналар мен роботтардың мүмкіндігін өзгертеді. Сондықтан, бұл мақалада біз бұл сенсорларға, олар қалай жұмыс істейді және олардың әртүрлі жұмыстарда және индустриялардағы ролі туралы көз жеткіземіз. Лазер триангуляция сенсоры өзіне жақындағы нesіпке дейінгі ара қашықтықты анықтау үшін лазерлерді пайдаланады. Сенсор нesіпке соғыс үшін лазер шығысын жібереді. Материал нesіпке қол жеткізді және лазер шығысын сенсорға қайтарады. робот лазердік көбейту машинасы содан кейін сенсор ол лазер нesіпке жетіп, қайта қайта беру уақытын есептейді. Бұл сенсорға нesіпке дейінгі ара қашықтықты есептеуге мүмкіндік береді. Бұл ақпарат өте маңызды, себебі ол роботтарға және машиналарға нesіптердің орналасуын анықтау және олармен қалай турастықпен жұмыс істеу керек екенін анықтауға мүмкіндік береді.
Лазер триангуляциялық сенсорлар қалай өндірістік саладағы місіндерде қарапайым болуға көмектеседі? Бір үлкен тәсіл: өлшеулерді дәлдігін арттыру арқылы. Егер лазердік жұмсаудың автоматтық жолы машиналар өнімдерді құру кезінде, олар өлшемдер мен түрлер туралы жиі дәл болуы керек. Лазер триангуляциялық сенсорлар барлық нәтижелерді дұрыс етуге көмектеседі, сондықтан өнімдер дұрыс шығады. Бұл дәлдік қателерді азайту және барлық нәтижелерді бастапқы кезде дұрыс ету арқылы уақыт пен пулды сақтауға мүмкіндік береді.
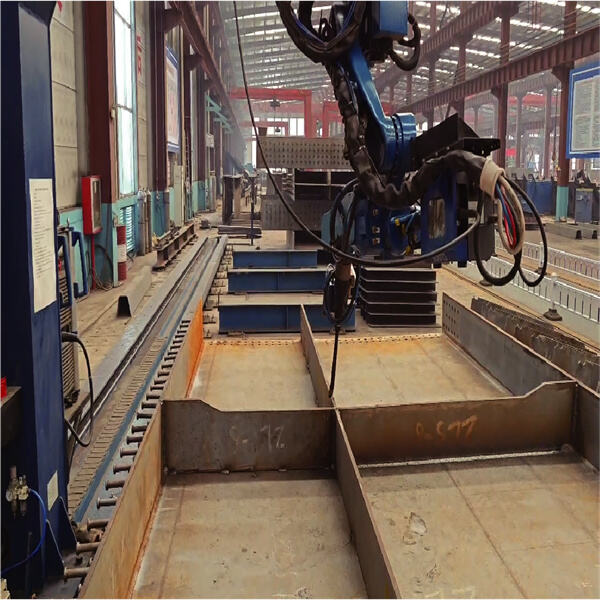
Лазердік триангуляция сенсорлары роботика саласында да өте пайдалы болады. Роботикада сенсорларды роботтың жағдай туралы білімін жоюға көмектесу үшін пайдаланамыз. Бұл уміт роботтарға қоршағанда навигациялау қабілетін және обьекттермен іс-әрекет ету қабілетін жоюға көмектеседі. Мисалы, складта робот қолданылса, ол лазердік триангуляция сенсорларын пайдаланып тіркелістерден асыру және пакеттерді қосымша емес әдісмен тауып алуды қамтамасыз етеді. лазердік қосу робот системасы . Содан кейін, тапсырмаларды орындағанда, ол роботтарға қажетті және дәлдікпен жұмыс істеуге мүмкіндік береді.
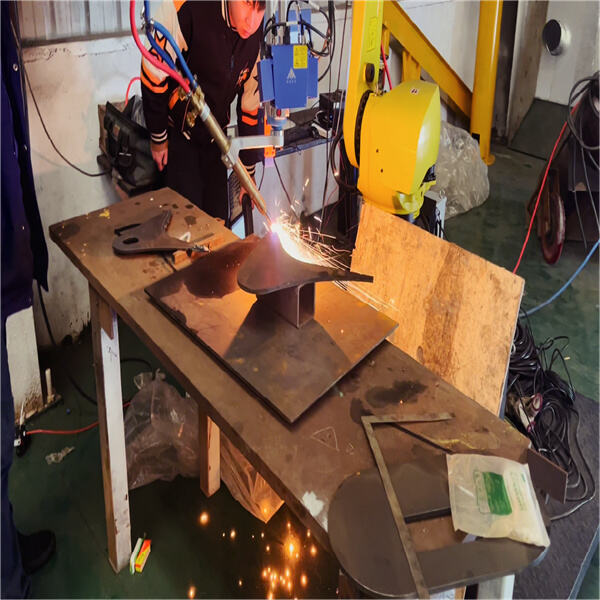
Қызметкерлердің сапасын тексеру – бұл өнімдерді дұрыс жасалған және бір негізгі стандартқа сай болатындығын қамтамасыз ететін өнімдерге қатысты маңызды бөлім. Өнімдердің барлығы дұрыс түрде жасалуды тексеру процестерінде лазердік триангуляция сенсорлары тиімді шешім болуы мүмкін. Мысалы, олар ... лазерлік жабдық сенсоры өлшеуі мүмкін болатын өлшемдік мағынасын анықтау және оның дұрыс өлшемде екенін тағайындау үшін пайдалануға болады. Бұл әдіс содан кейінгі қателерді алып тастауға мүмкіндік береді және басқарудың дұрыстығын тексереді. Лазер триангуляция сенсорлары қалыптық басқарудың дефекттерін алдын-ала анықтайды және клиенттерге тек дұрыс өнімдер шығарылады.
Лазер Триангуляция Сенсорларының Артықшылықтары технология өзгертілгенде, олар лазердік жақындық сенсор автоматтық процестерде және басқа салаларда әлдеқайда маңызды болады. Оларды пайдалану үшін жаңа және қызықтырғыш нысандар шығарылады, машиналар мен роботтардың зерттеу қабілеттерін және қызметкерлікті арттырады. Мисалы, келесі өзі-өзі қозғалатын аутомобилдер лазер триангуляция сенсорларын қолданып, қоршаған жерлерден қашып өту үшін пайдалануы мүмкін. Оларды медициналық құралдарда әріптестерге қолдастыру үшін пайдалану да мүмкін, операцияларды дәл және қауіпсіз орындауға көмектеседі. Бұл сенсорлардың қолданбалары виртуальды тікелей!
Бейжинг Минюэ Технолоджи Ко.,ЛТД - бұл өнеркәсіп роботтардың негізгі ғылыми-техникалық қызметтерін ұйымдастыратын дүниандық компания. Біз RobotSmart - Роботтық Өңдеу Системасы, SmartVision - Екі Глаздан Тұратын Структуралық Айналымдық Көркіт Системасы және SmartEye - Лазердік Көркіт Жолау Системасын қамтамасыз ететін гибрид өңдеулерге арналған таңбалы шешімдер ұсынамыз.
Көптеген роботтар, көптеген сыртқы осьтер және позиционерлер үшін қызметке сапарлау, бастық жабдықтарын, қорықтық жабдықтарын және ось шектерін анықтау үшін зор қосымша жабдықтармен, қорықтық жабдықтармен және телескоптық орналастыру арқылы қосымша жабдықтар үшін мотивацияландыру. Робот қозғалысын симуляциялау, кездесу тезекеттерін анықтау, тенгестікті қайта жасау және ось шектерін тексеру.
Тез, дәл, барлық Программалауға жоқ, ырыс тапсырмалы және дәлдікке ие. Ол традиционалды роботтардың күрделі оқыту процесін шешеді және оқыту процесіндегі жұмыс аясын сақтайды.
Табу және отбіру функциясын қолдану, шовты сканирование, шов позициясы мен мәліметтерін тастайтын, 3D цифрик модельдеу суреті мен нақты жұмыс есептің арасындағы шов позициясын түзету, және қосымша материалдардың қателері мен термік деформацияға негізделген шектеулі шов проблемасын шешу.
 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK








