Лазердік қашықтық сенсоры неге? бүгін біз сіздермен қалай машиналар өлшеу шарттарын қолданбай, қашық нesелерді өлшей аладыҒын талқылауды қарастырамыз
Бірнеше профессияларда және салаларда лазер технологиясы қашықтықты өлшеу жолдарын толық түрде өзгертіп жатады. Лазерлерге рақметті, біз қашықтықты жылдамдық пен дәлдікпен өлшеуге мүмкіндік табып келіп жатырмыз.

Төртінші салаларда лазер қашықтық сенсорына көптеген жақсы пайдалар бар. Медициналық саладағы дәрігерлер мысалы, бұл лазер сенсорларын қашықтық өлшемдерін жинау үшін пайдалана алады
Лазердік қашықтық сенсорларының дәлдігі және анықтығы оның ең соңғы мүмкіндіктерінан бірі. Бұл олардың мүмкін болатын ең кіші детальде қашықтықтарды өлшеуін аңлатады – бұл олардың көптеген индустрияларда маңызды етеді. Деректер AI үйренуге және өзін өңдеуге көмектеседі — AI модель деректерге негізделген тәуліктегі уақытша үйренеді — Ол

Лазердік қашықтық сенсорларына қарай және табиғаттың ақылы болған, шығармашылық болашағы бар. Әлемдегі ғалымдар мен инженерлер лазер сенсорларының жаңа нұсқаларын қалай жасауға тырысып жатыр, оларды жақсырақ, жылдамрақ және
Бейжинг Минюэ Технолоджи Ко.,ЛТД - бұл өнеркәсіп роботтардың негізгі ғылыми-техникалық қызметтерін ұйымдастыратын дүниандық компания. Біз RobotSmart - Роботтық Өңдеу Системасы, SmartVision - Екі Глаздан Тұратын Структуралық Айналымдық Көркіт Системасы және SmartEye - Лазердік Көркіт Жолау Системасын қамтамасыз ететін гибрид өңдеулерге арналған таңбалы шешімдер ұсынамыз.
Тез, дәл, барлық Программалауға жоқ, ырыс тапсырмалы және дәлдікке ие. Ол традиционалды роботтардың күрделі оқыту процесін шешеді және оқыту процесіндегі жұмыс аясын сақтайды.
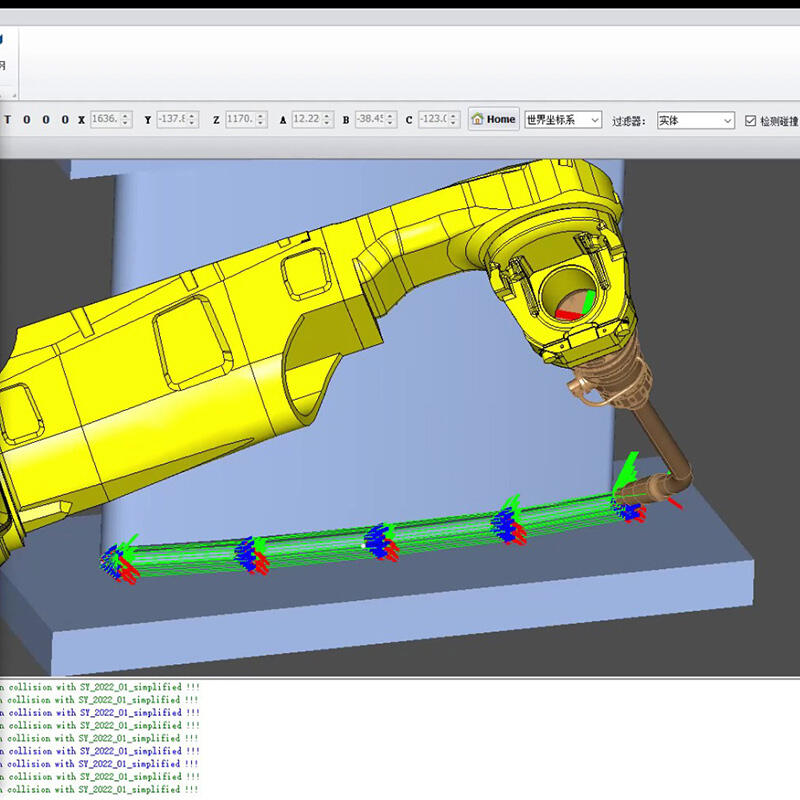
Көптеген роботтар, көптеген сыртқы осьтер және позиционерлер үшін қызметке сапарлау, бастық жабдықтарын, қорықтық жабдықтарын және ось шектерін анықтау үшін зор қосымша жабдықтармен, қорықтық жабдықтармен және телескоптық орналастыру арқылы қосымша жабдықтар үшін мотивацияландыру. Робот қозғалысын симуляциялау, кездесу тезекеттерін анықтау, тенгестікті қайта жасау және ось шектерін тексеру.
Табу және отбіру функциясын қолдану, шовты сканирование, шов позициясы мен мәліметтерін тастайтын, 3D цифрик модельдеу суреті мен нақты жұмыс есептің арасындағы шов позициясын түзету, және қосымша материалдардың қателері мен термік деформацияға негізделген шектеулі шов проблемасын шешу.
 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK







