Რობოტები არის დამახასიათებელი მაशინები, რომლებიც შეძლებენ გაკეთებას ყველა ნარჩუნის მსგავსი რამ. ისინი შეძლებენ გარდავალ გარშემო მოძრაობას, რაღაც აიღოს და ამავე განაცხადონ ჩვენთან. მაგრამ გეიცი რა ხდის შესაძლებლობას ყველა ამ გასაფრთხილების? სენსორები მუშაობენ რობოტების პატარა თვალები, ქვეშანი და მუ谡ლების მსგავსად, რომლებიც აძლევენ რობოტებს გამოსასმენად, გამოსახანად და გამოსასახლელად იმ, რაც მათ გარშემო მდებარეობს. მოდით უფრო მიახლოებით განვიხილოთ და ნახოთ როგორ დახმარება სენსორები რობოტებს მათი გასაფრთხილების შესრულებაში.
Იფიქრეთ MINYUE-ზე ai რობოტი სცენარი იყო, რომ რობოტი ცდილობდა გადავა კომნაში, სადაც ჰქონდა სცედები და მაგიდები. თუ რობოტს ვერ ჰქონდა სენსორები, ის შეიძლება ჩართავდეს რამდენიმე რამ ან Naw even ჩახუჭდეს. ეს არ იქნებოდა კარგი. ვიზუალური და ულტრასაუნდოვი სენსორები ძალიან სასარგებლო სენსორებია, რადგან ისინი აძლევენ რობოტს შესაძლებლობას მისი გზაზე მდებარე ადგილების განსაზღვრას და იდენტიფიკაციას. ეს სენსორები სამსახუროდ ვინაიდან რობოტის თვალებს ვინაიდან, რომლებიც აძლევენ მას შესაძლებლობას დაინახავს, სად უნდა წავა. ეს ტაქტილური განათლება აძლევს რობოტს შესაძლებლობას პრობლემების მსგავს სცედების ან მაგიდების გარშემო ცუდი გამოსავლის გარეშე ნავიგაციას. ეს უნარი აძლევს რობოტებს შესაძლებლობას განსაკუთრებით გარდავა განსხვავებულ გარემოებში, როგორიცაა სახლები, სკოლები ან პარკები, შეცდომების ან რამეს ჩართვის გარეშე.
Რობოტის მოძრაობა წყვილებში განაპირობებს გადაწყვეტილებას, რომ არ შეუცვალოს ნებისმიერი რამე და მიიღოს მიზნი. რეალური დროში სენსორების გამომავალი საშუალება რობოტებს მისცემს ინფორმაციას შემდეგი მოქმედების შესახებ. მაგალითად, თუ სენსორი განიხილავს რამე რობოტის მოძრაობის ხაზზე, ინფორმაცია გაიგზავნება რობოტის „განათლებაში“ სიგნალების სახით, რომელიც აღინიშნავს რობოტს ჩათითობა, გარდაბრჭოლა ან მოძრაობის გარკვევა რამეს გარეშე. შედეგად, MINYUE ინტელექტუალურად განათლებულ რობოტებს შეიძლება უწყვეტლად აღინიშნოს მისი გარემო, რაც ნიშნავს, რომ ის შეიძლება უწყვეტლად განაპირობოს კრიტიკულ გადაწყვეტილებებს, რომლებიც მას დაახელებიან მოძრაობაში და საფეხურში. ეს არის როგორც თამაში მისაღები მაგალითებისგან და საუკეთესო გზის მოძრაობა რობოტისთვის.
Ვიცით თუ რა აკეთებენ რობოტიკოსები? რობოტის სენსორები, როგორც MINYUE ლეიზერის სენსორი გამოიყენება საკუთარი მიზნებისა და განსხვავებული ადგილების მართვისთვის. (რობოტის ხელებში მდებარე სენსორები, მაგალითად, შეძლებენ განიხილონ ადგილის ზომები ან ფორმა, რაც აძლევს მას შესაძლებლობას მას ზუსტი მიღებით და მარტივად ჩაწერით მიიღოს.) ეს ძალიან მნიშვნელოვანია, რადგან ეს ნიშნავს, რომ რობოტი შეიძლება დააჭიროს რაღაც ძალიან მძლავრად ან ძალიან მარტივად, რაც მიიღებს მას არ გახადეს და არ გახადეს, ან გადაწყვეტს მას დააჭიროს. ასევე, სენსორები შეძლებენ განიხილონ რამდენად მძლავრადაა რაღაც და რამდენად მỀრთელადაა, რაც აძლევს რობოტებს შესაძლებლობას მარტივად ჩაწერით ადგილების მიღება. ეს სენსორები შეძლებენ რობოტებს ზუსტად ადგილების მიღება, კომპონენტების შექმნას ან მასალების დაჭრას. ეს ხდის მათ ძალიან სასარგებლო ყველა ტიპის გარემოში.

Რობოტები, ძალიან მსგავსად ადამიანებს, მოითხოვნენ მეცნიერება, ასე რომ კარგად მუშაობის გარეშე თქვენი რობოტის განგრძელობაც მაღალი იქნება. სენსორები როგორიცაა მაღალი სიჩქარის ლაზერული სენსორი ასევე შეიძლება დახმაროს რობოტებს იმ მომენტში, როდესაც ისინი დაიწყებენ გამოჩენას უზრუნველყოფის ნიშნების, ან როდესაც რაღაც მაशინში არ მუშაობს სწორად. ასეთი პრობლემები შეიძლება გადაჭრილი იქნებინ, ან გახდეს სერიოზული პრობლემები, რობოტებისთვის. მაგალითად, სენსორები უყურეს, რამდენად ცხენილია რობოტის მოტორები — და ისინი შეიძლება განახლონ მას, ვინც მათ მართავს, თუ ისინი გახდებიან გამეორებული. თუ რაღაც ძალიან ცხენილია, ის შეიძლება აღარ მუშაობდეს ან დაინაგადებინება. რადგან პრობლემები დაიკვირვებიან ადრე, სენსორები მართავენ რობოტებს კარგ მდგომარეობაში და განაპირობენ მათ სწორ მუშაობას.
Არ არის თუ შემდეგი განსაზღვრავი, თუ რობოტი შეძლებს გასაგებად ახდენის იმ, რაც ჩვენ ვთქვათ ან ვაკეთებთ? სენსორები აძლევენ რობოტებს შესაძლებლობას ადამიანებისა და მათ აქტივობის განახლებასა და მიუპასუხებლობას. მაგალითად, თუ რობოტის თავში არის სენსორები, ისინი შეძლებენ ადამიანურ სა面料-ს ნახვას და ხმების გასმას. ეს აძლევს რობოტს შესაძლებლობას ადამიანების იდენტიფიკაციასა და მეგობრულად მათ თანამშრომლობის შესახებ. სენსორები ასევე შეძლებენ ხელების მოძრაობების ან ბრძანებების განახლებას. ეს აძლევს რობოტებს შესაძლებლობას ბრძანებების მისამართებლად და ადამიანების გსურვების მიხედვით ამოცანების ამოხსნას. ამ ადამიანურ გავლენას მსგავსი გავლენა შეიძლება განაპირობოს რობოტების გახადებას მეგობრული ფიგურებად, რომლებიც შეძლებენ ადამიანებთან ინტერაქტიულად და ურთიერთობაში ჩანართვას.
Пекинს Minyue Техნოლოგია Co., LTD, როგორც მსოფლიო მიერ მובילი სამეცნიერო კომპანია ინდუსტრიული რობოტების გარემოში განათლების გარეშე ინტელექტუალური აპლიკაციები. ჩვენ განხილული ვართ წყვეტილი ინტელექტუალური შემუშავება ჩვენს თვით-განვითარებული RobotSmart - ინტელექტუალური გადაწყვეტილების სისტემა, SmartVision - ბინოკულარული სტრუქტურული სინათლე ვიზუალური სისტემა, და SmartEye - ლაზერული ვიზიუალური შემდეგი სისტემა. გთავაზობთ ახალი გენერაციის ინტელექტუალური რობოტული საკერძო და დაჭრივი ამოხსნები.
Სწრაფი, ზუსტი, მთლიანად პროგრამირების გარეშე, მაღალი ეფექტიურობა და ზუსტება. ის ამოხსნის تقليს რობოტების სირთულეად სწრაფ პროცესს და შენახავს სწრაფი პროცესის ჩათვლის დრო.
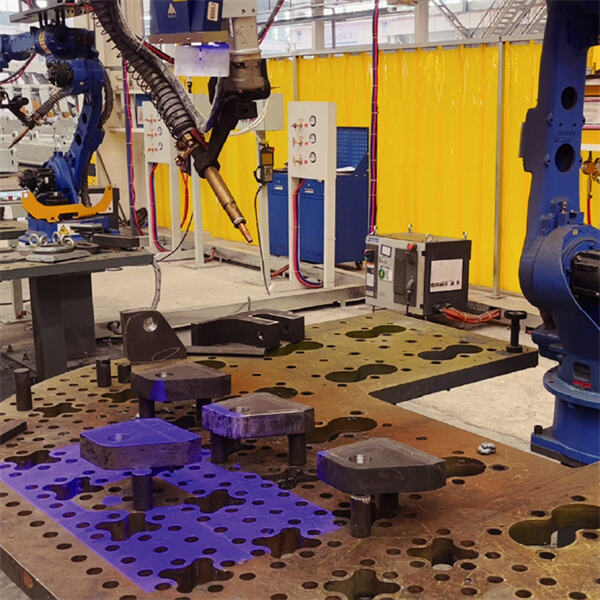
Გამოყენებით ფუნქციების ძებნასა და გადამოძრაობას, სკანირება სველის კრავის, დადასტურებს კრავის ადგილმდებარეობასა და ინფორმაციას, განახლებს სველის ადგილმდებარეობას 3D ციფრული მოდელის და რეალური ნაწილის შორის, ამოხსნის პრობლემას სველის გადახრის გამო შესაბამისი მასალების შეცდომებისა და თერმული დეფორმაციის გამო.
Გთავაზობთ ძალიან სიმძლავრი საკერძო რობოტის წინა ჩატვირთვა, გვერდიდან ჩატვირთვა, შებრუნებული ჩატვირთვა, განრიგი მაუნტინგი, ინტელექტუალური ტრაექტორიის გეგმა რამდენიმე რობოტისთვის, რამდენიმე გარე ღერძებისთვის და პოზიციონერისთვის საერთო მუშაობისთვის. რეალიზებს რობოტის მოძრაობის სიმულაციას, კოლიზიის გამოკვლევას, ერთობლივობის გარეშე და ღერძის ზღვარის გამოკვლევას.
 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK








