Რა არის ლაზერის მითითებული მანძილის გამოსაზღვრელი? დღეს ჩვენ განხილავთ თქვენთან, როგორ შეძლებს მანქანები გაზომავი მანძილზე მდებარე აბჯექტები, არ გაზომის
Რამდენიმე პროფესია და ინდუსტრიაში, ლაზერ ტექნოლოგია ჭარბად ცვლის მანძილთა ზომვას. ლაზერების გამო, ჩვენ შეგვიძლია ზომოთ მანძილები იმავე სიჩქარით და ზუსტით, როგორც იზრდება.

Განსხვავებულ სფეროებში, ლაზერ მანძილთა სენსორს არის რამდენიმე დიდი წ gaussian_რები. მაგალითად, მედიცინის სფეროში დოქტორები შეძლებენ გამოიყენონ ეს ლაზერ სენსორები მანძილთა ზომების შესაკრებლად.
Ლაზერული დისტანციის სენსორების ზუსტობა და მწკრივობა არის ერთ-ერთი მათი ყველაზე გასაღები შესაძლებლობა. ეს ნიშნავს, რომ ისინი ზოგადად საშუალებას აძლევენ მანძილის ზუსტ საზომებლად – რაც მათ ძალიან მნიშვნელოვანი ხდის ბევრი ინდუსტრიაში. მონაცემები არის იმ გზა, რომელიც AI-ს სწავლა და საკუთარი გაუმჯობესება – AI მოდელი სწავლობს მონაცემებზე მდგომარეობის მდგომარე პუნქტამდე – ის

Ლაზერული დისტანციის სენსორებს აქვს ძალიან ნათელი და გამოვიდის მომავალი. ამჟამად მეცნიერები და ინჟინერები მთელ მსოფლიოში გამომუშავებულია ლაზერული სენსორების ახალი ვერსიები, რომლებიც უზრუნველყოფილია მათ გაუმჯობესებაზე, ჩქარებაზე და
Пекинს Minyue Техნოლოგია Co., LTD, როგორც მსოფლიო მიერ მובילი სამეცნიერო კომპანია ინდუსტრიული რობოტების გარემოში განათლების გარეშე ინტელექტუალური აპლიკაციები. ჩვენ განხილული ვართ წყვეტილი ინტელექტუალური შემუშავება ჩვენს თვით-განვითარებული RobotSmart - ინტელექტუალური გადაწყვეტილების სისტემა, SmartVision - ბინოკულარული სტრუქტურული სინათლე ვიზუალური სისტემა, და SmartEye - ლაზერული ვიზიუალური შემდეგი სისტემა. გთავაზობთ ახალი გენერაციის ინტელექტუალური რობოტული საკერძო და დაჭრივი ამოხსნები.
Სწრაფი, ზუსტი, მთლიანად პროგრამირების გარეშე, მაღალი ეფექტიურობა და ზუსტება. ის ამოხსნის تقليს რობოტების სირთულეად სწრაფ პროცესს და შენახავს სწრაფი პროცესის ჩათვლის დრო.
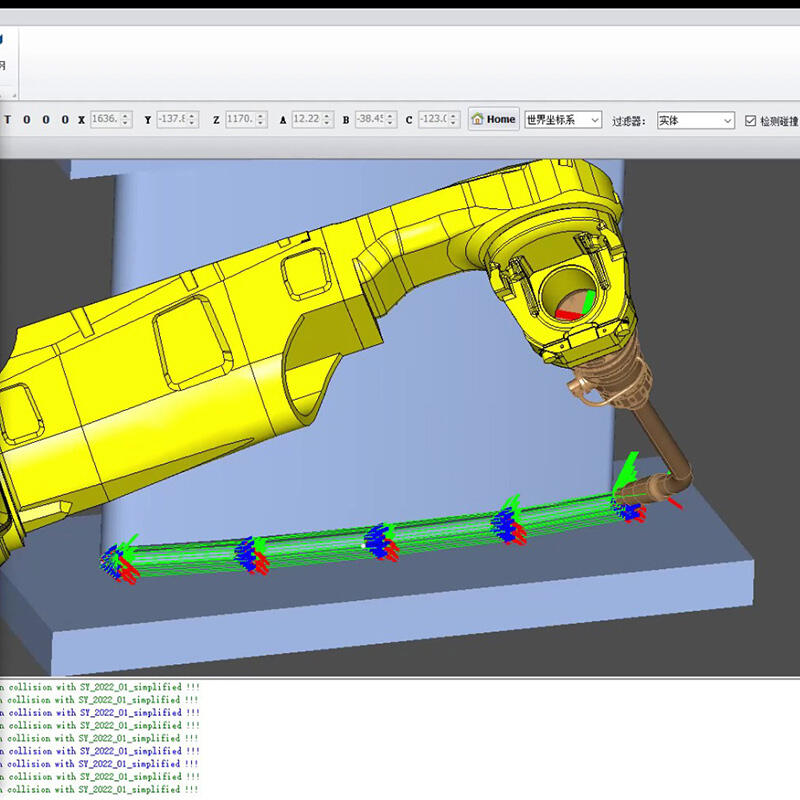
Გთავაზობთ ძალიან სიმძლავრი საკერძო რობოტის წინა ჩატვირთვა, გვერდიდან ჩატვირთვა, შებრუნებული ჩატვირთვა, განრიგი მაუნტინგი, ინტელექტუალური ტრაექტორიის გეგმა რამდენიმე რობოტისთვის, რამდენიმე გარე ღერძებისთვის და პოზიციონერისთვის საერთო მუშაობისთვის. რეალიზებს რობოტის მოძრაობის სიმულაციას, კოლიზიის გამოკვლევას, ერთობლივობის გარეშე და ღერძის ზღვარის გამოკვლევას.
Გამოყენებით ფუნქციების ძებნასა და გადამოძრაობას, სკანირება სველის კრავის, დადასტურებს კრავის ადგილმდებარეობასა და ინფორმაციას, განახლებს სველის ადგილმდებარეობას 3D ციფრული მოდელის და რეალური ნაწილის შორის, ამოხსნის პრობლემას სველის გადახრის გამო შესაბამისი მასალების შეცდომებისა და თერმული დეფორმაციის გამო.
 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK







