Ვაუ. განიხილეთ საკმარისი წარმოება? არის კარგი მიზეზი იმისთვის, რატომ არის ამჟამად ასე პოპულარული. საკმარისი წარმოება იყენებს ისეთ ტექნოლოგიებს, როგორიცაა MINYUE ინტელექტუალური რობოტი და კომპიუტერებს, რათა წარმოიდგინოს რამდენად სწრაფად, ეფექტურად და საფასურად შეძლებენ პროდუქტების წარმოება. წარმოიდგინეთ ეს როგორც სუპერ-დახმარებული ფაბრიკაში. ეს გაიდება ყველას, რომ ყველაფერი მუშაობდეს სწრაფად და უსრულოდ, რაც შესაძლებლობას გაძლევს ყველას აკრივად შესრულონ თავიანთი დავალებები.
Მომავალოთ ცოტა ისტორია იმის შესახებ, თუ როგორ განვითარებულია წარმოება წლების განმავლობაში. წინასაკითხში ადამიანებმა რამდენიმეს გაკეთებდნენ ხელით, ერთ-ერთსა დროს. რამდენი დრო გჭირდებოდა იმისთვის, თქვენ განიხილავთ? ნებისმიერი მარტივი რამეც ძალიან დიდი დრო მოითხოვდა. შემდეგ მანქანები — ბუნებრივი მანქანები, ტრანსპორტირების ტასი — გამოვიდნენ და დაგვეხმარეს. ამ გამომგვალებლებს მსგავსად MINYUE ინტელექტუალურად განათლებულ რობოტებს შესაძლოა მუშაობა განხორციელდეს მეტად სწრაფად და ეფექტურად, რაც ადამიანებს შეუძლია ბევრი განსხვავებული აბجექტი განაკეთონ და სწრაფად. ახლა, ინტელექტუალური წარმოებით, შეგვიძლია მივიღოთ მთლიანი ახალი დონე სرულყოფილებისა და ეფექტურობის. სასარგებლოა, თუ რამდენად გავიანეთ.
Რა დაგვიწეროს, თუ მანქანები შეძლებდნენ ერთ-ერთს შორის კომუნიკაციას და თავისი გარეშე განაპირობებდნენ? რა მეტიც, ზუსტად ეს არის ინტელექტუალური წარმოების განსაზღვრა. გამოყენებით სპეციალურ ინსტრუმენტებს, რომლებსაც სენსორები და ინტელექტუალური ტექნოლოგია უწოდებენ, ეს მანქანები შეძლებენ განახილონ პრობლემები ისინივე მაგალითების გარეშე (და ასევე შეძლებენ თავიანთ მეცადების ჩასწორებას). ეს ნიშნავს ნაკლებ დროს დამაგვირვებისთვის და ნაკლები შეცდომები წარმოების ციკლში. ეს გვე容ებთ რამდენიმე სწრაფად და უფრო მარტივად და მაღალი მსგავსებით შევქმნათ. არის მაგალითად განსაკუთრებით ეფექტური მანქანების გუნდი, როგორიცაა ინტელექტუალური რობოტიკის სისტემები ეფექტურად ერთად მუშაობს და ასრულებს ამოცანას.

Ყოველ დღე ტექნოლოგია ჩვენს ცხოვრებაში შემოностის რაღაც ახალი, და ჩვენ შეგვიძლია უპირატეს გაუმართლოთ ზაფხული ცვლილებები წლების განმავლობაში. მხოლოდ განიხილეთ რამდენი ციფრული ინოვაცია გვაქვს: 3D პრინტერები გვეუბნებიან პროდუქტების შესამუშაო სამგანზომილებლად; ვირტუალური რეალისტი გვაძლევს შესაძლებლობა შევქმნათ რამე ისე, რასაც არ ვიფიქრობდით არასადიდე; ვარიანტები არის უზარმაზარი. რა თქმა უნდა, ვიelleicht მარსზე განვახლოთ „ქარხნები“ ჩვენი მოგების შესამუშაოდ. გე前列თ საშიში პროსპექტები.
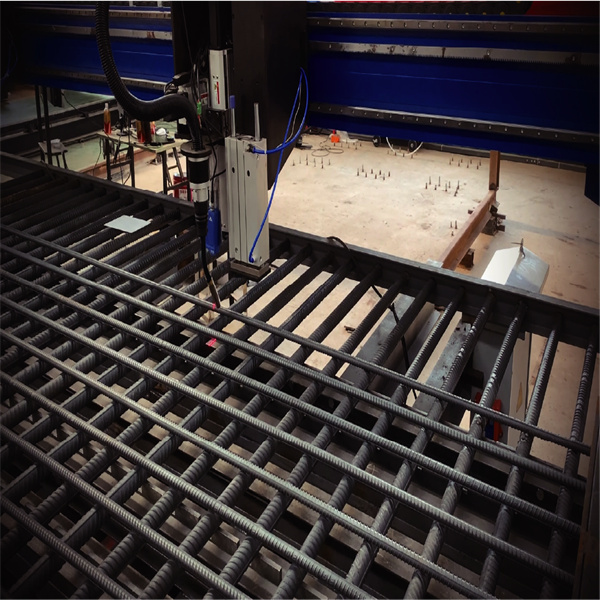
Შემდეგ, მომავალი ფაბრიკის შესახებ განიხილეთ, როგორ ფორმირებს MINYUE საკმარისი წარმოება. წარმოიდგინეთ ავტომატები, რომლებიც წარმოადგენენ საჭმლებს ან ფაბრიკა, სადაც რობოტები აკეთებენ ყველა тяжелую მუშაობას, ხოლო ადამიანები აღნიშნავენ პროფესიულ და კრეატიულ მუშაობას. ეს ძალიან გასასარგებელია, არა? საკმარისი წარმოება ხელს უწყობს ყველას უფრო კარგი გარემოს შექმნაში, ავტომატიზაციის საშუალებით განმეორების პროცესების ჩამორთვით. ეს ნიშნავს, რომ ადამიანები მეტ დრო გადახარჯებენ თანამედროვე მოსაზრებების და ინგენიოზობის გამოყენებაზე, ვიდრე განმეორების მუშაობაზე.
Სწრაფი, ზუსტი, მთლიანად პროგრამირების გარეშე, მაღალი ეფექტიურობა და ზუსტება. ის ამოხსნის تقليს რობოტების სირთულეად სწრაფ პროცესს და შენახავს სწრაფი პროცესის ჩათვლის დრო.
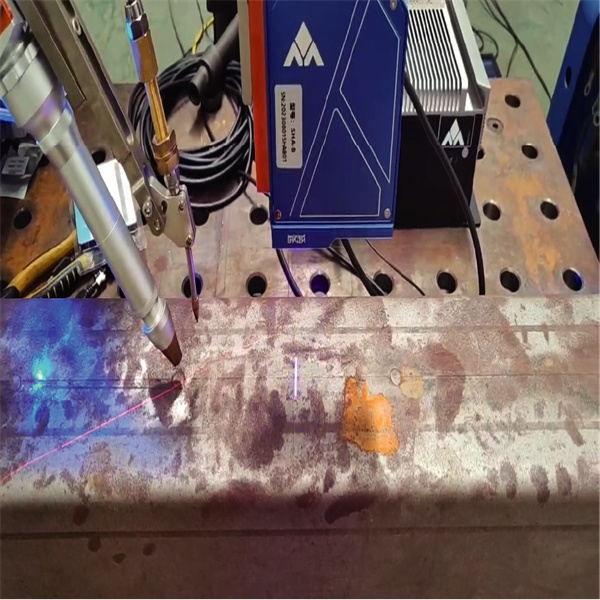
Გამოყენებით ფუნქციების ძებნასა და გადამოძრაობას, სკანირება სველის კრავის, დადასტურებს კრავის ადგილმდებარეობასა და ინფორმაციას, განახლებს სველის ადგილმდებარეობას 3D ციფრული მოდელის და რეალური ნაწილის შორის, ამოხსნის პრობლემას სველის გადახრის გამო შესაბამისი მასალების შეცდომებისა და თერმული დეფორმაციის გამო.
Пекинს Minyue Техნოლოგია Co., LTD, როგორც მსოფლიო მიერ მובילი სამეცნიერო კომპანია ინდუსტრიული რობოტების გარემოში განათლების გარეშე ინტელექტუალური აპლიკაციები. ჩვენ განხილული ვართ წყვეტილი ინტელექტუალური შემუშავება ჩვენს თვით-განვითარებული RobotSmart - ინტელექტუალური გადაწყვეტილების სისტემა, SmartVision - ბინოკულარული სტრუქტურული სინათლე ვიზუალური სისტემა, და SmartEye - ლაზერული ვიზიუალური შემდეგი სისტემა. გთავაზობთ ახალი გენერაციის ინტელექტუალური რობოტული საკერძო და დაჭრივი ამოხსნები.
Გთავაზობთ ძალიან სიმძლავრი საკერძო რობოტის წინა ჩატვირთვა, გვერდიდან ჩატვირთვა, შებრუნებული ჩატვირთვა, განრიგი მაუნტინგი, ინტელექტუალური ტრაექტორიის გეგმა რამდენიმე რობოტისთვის, რამდენიმე გარე ღერძებისთვის და პოზიციონერისთვის საერთო მუშაობისთვის. რეალიზებს რობოტის მოძრაობის სიმულაციას, კოლიზიის გამოკვლევას, ერთობლივობის გარეშე და ღერძის ზღვარის გამოკვლევას.
 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK