 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK


Պլազմային անկյունագիծ սահքի լուծում գաղափարական արտադրության համար
Ռոբոտական խողովակի սահքման գործարանում, հաղորդագրության ռոբոտները դիմում են նմանատիպ դժվարություններին։ Minyue տեխնոլոգիայի "Non-Teach" լուծումը эффեկտիվորեն օգնում է գործընկերներին լուծել գործարանի առանձնահատկությունները, և այն արդեն է հաշվարկվում և կիրառվում ճարտարագիտական մեքենաների առաջատար գործընկերում։ Ֆլեքսիբիլ արտադրության տեսանկյունից, ռոբոտական համակարգերի հետ ավտոմատացման և ինտելեկտուալ մակարդակների բարձրացումը պետք է ավելի հեշտ լինի։ Minyue տեխնոլոգիայի ինտելեկտուալ հաղորդագրության ռոբոտական պլատֆորմը համարվում է «կարող է օգտագործվել և հեշտ է օգտագործել» այդ գաղափարով՝ սահքման գործարանի համար կիրառելով և օգնելով օգտագործողներին արտադրության մակարդակում։

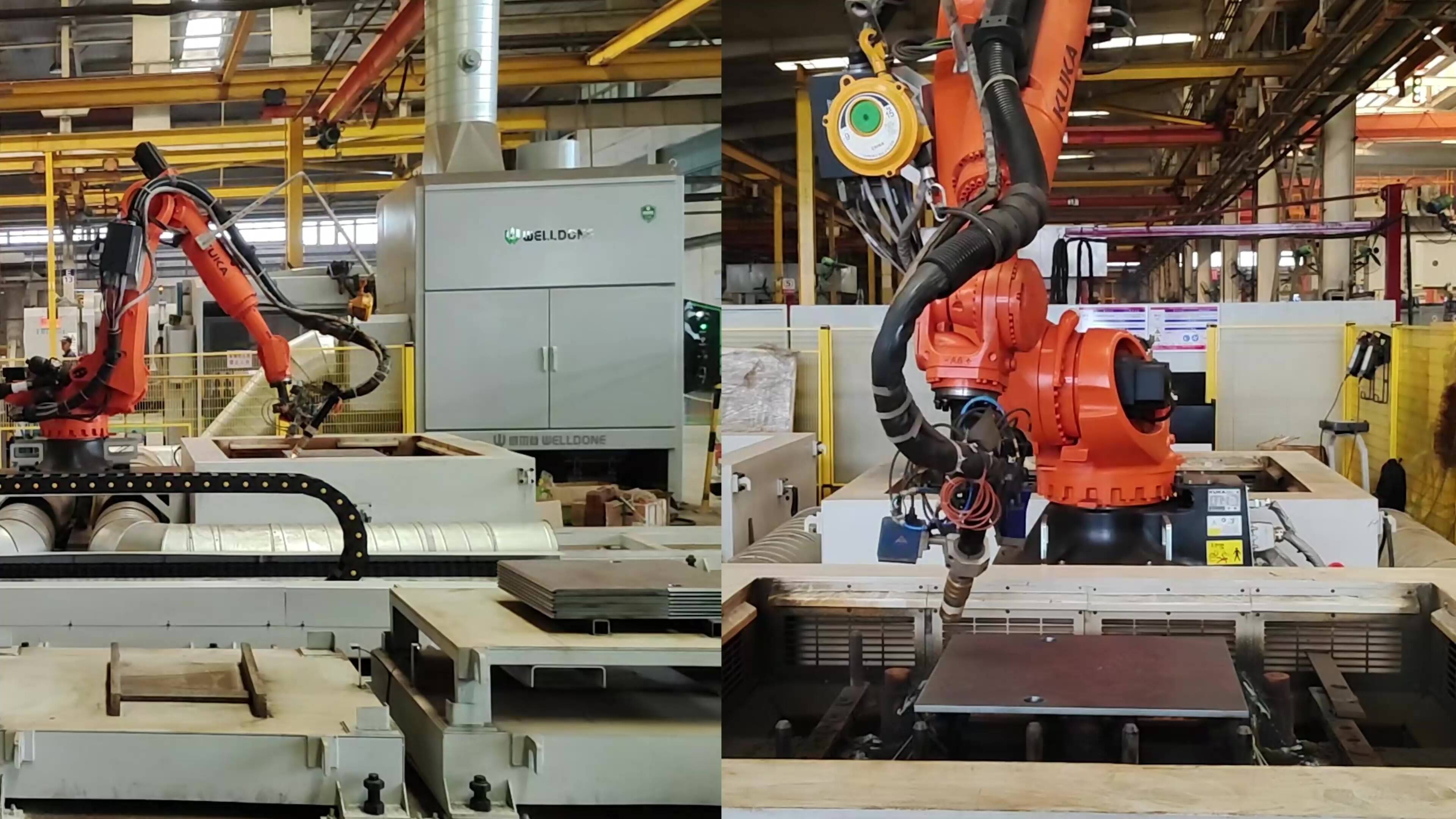
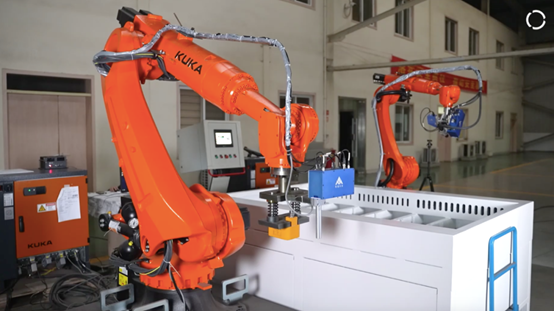
Non-Teach ռոբոտական խողովակի սահքման ստացիոնար
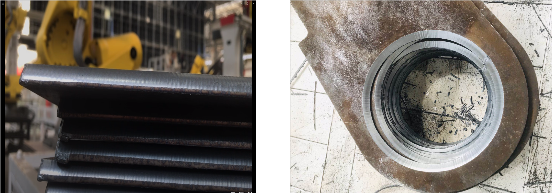
Գործի սահքման արդյունք
Մինյուե տեխնոլոգիան առաջարկում է ոչ դասավանդված ինտելեկտուալ սլաքի կտրումի լուծում, որը իրականացնում է մեկ կոճակով պարզ գործողություն: Սլաքի կտրում՝ հիմնված օֆլայն ծրագրավորման և վիզուալ սենսորային ստորագրումի վրա դա համարժեք է անմարդունակ լուծումներին ռոբոտականության արդյունաբերության մեջ! Այս լուծումը ունի երեք կարևոր առավելություն:
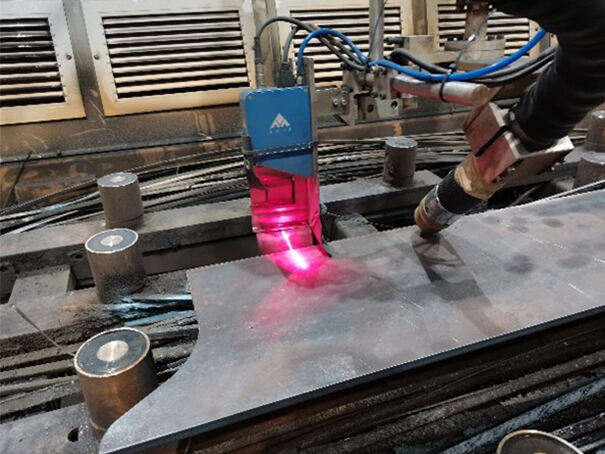
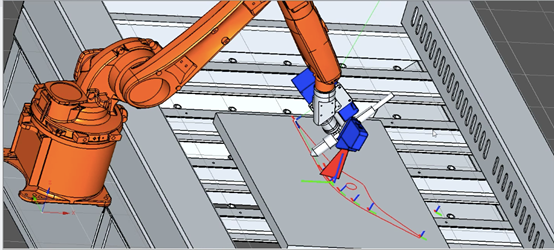
Առաջին կետը. Ազատանում է մարդկանց բարդ ծրագրավորման ından։ Ծրագրավորման առաջին փուլում՝ օֆլայն ծրագրավորման ծրագրերի օգտագործմամբ և CAD գծագրերի հիման վրա՝ ինքնակի տրայեկտորիայի պլանավորում և կտրման տրայեկտորիայի ստեղծում։ Ծրագրավորման ընթացքում՝ օգտագործվում է լայն դաշտի երկուայն կամերա, որը իրականացնում է կրկնակի դիրքավորում, իսկ լազերը՝ կտրման տրայեկտորիայի ճշգրիտ حيحում։ Այս լուծումը կարող է հիմնականում լուծել աշխատանքային մարմնի ձգվածքի և անհամապատասխանության խնդիրը։
Երկրորդ կետը՝ այն ինտեգրված է բարձր մակարդակի 悍ցման գործառույթների գրադարանով, ներառյալ հրազենի սահքում և պլազմայի սահքում և այլն. Սահքման գործընթացում սահքման կողմերի, սալի հաստության, նյութի, սահքի անկյունի, սահքի խիստ կողմի միջոցով, այն ավտոմատ կորzystում է օդի հոսանքի, լարի և հոսանքի պարամետրերը՝ արագացնելով սահքման գործընթացը անձանց միջանկյունում։
Երրորդ կետը՝ այն բա hjարում է կատարյալ լուծում, որը կարող է համապատասխանել սահքի տարածաշրջանների տարբեր պայմաններին, ներառյալ միակ ռոբոտի սահքման աշխատակից փոքր և միջին չափանի աշխատանքային մասերի համար, երկու ռոբոտների սահքման, բեռնումի և սահքման աշխատակից մասերի համար, ավելի մեծ աշխատանքային մասերի համար։





