Այս հատուկ գործիին կոչվում է լազերային տրիանգուլացիայի սենսոր և նա նշանակալիորեն բարելավում է մեխանիզմների և ռոբոտների կարողությունը: Այսպիսով, այս հոդվածում մենք կնայենք այս սենսորներին, ինչպես նրանք աշխատում են և ինչ է նրանց դերը տարբեր աշխատանքներում և գործարաններում: Լազերային տրիանգուլացիայի սենսորը օգտագործում է լազերներ օբյեկտի հեռավորությունը որոշելու համար: Դիցուք սենսորը ուղարկում է լազերային լուսային հարթություն օբյեկտի վրա: Մանրական նյութը կապում է օբյեկտը և վերադառնում է լազերային հարթությունը սենսորի մեջ: robot laser welding machine ապա հաշվում է ժամանակը, որքան ժամանակ է պահանջվում այդ լազերին ճանապարհով տեղի հասնելու և վերադառնալու: Սա թողնեց սենսորին հաշվել հեռավորությունը օբյեկտի մինչև։ Այս տեղեկատվությունը արդյունավետ օգնում է, քանի որ թողնում է ռոբոտներին և մեխանիզմներին որոշել օբյեկտների դիրքը և ինչպես ճիշտ փոխազդել դրանց հետ։
Ինչպես է աշխատում լազերային տրիանգուլացիայի սենսորները՝ հասանելու համար հաջողությանը որպես որոշում որպես աշխատանքների միջոցով՝ ինչպես որպես համակարգավորություն։ Մեծ եղանակ՝ ավելի ճշգրիտ չափումներով։ Երբ լազերային վիճbum ավտոմատացում մաքինաները ստեղծում են արտադրանքներ, և նրանք պետք է լինեն արդյունավետորեն ճշգրիտ չափումների և ձևերի մասին: Լազերային տրիանգուլացիայի սենսորները օգնում են համոզվել, որ ամբողջ ինչ-որ բան ճիշտ է, որպեսզի արտադրանքները դուրս գան ճիշտ: Այս ճշգրտությունը կարող է խանգարել ժամանակ և գումարներ սխալների մինիմալիզացմամբ և համոզվելով, որ ամբողջ ինչ-որ բան ճիշտ կատարվել է սկզբն իսկից:
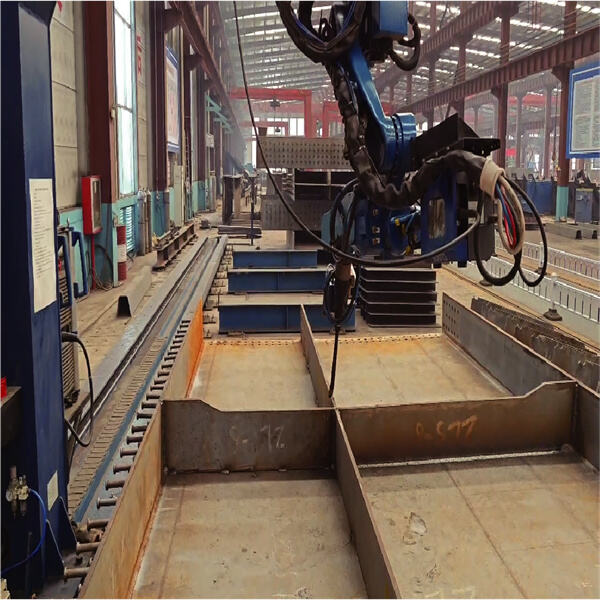
Լազերային տրիանգուլացիայի սենսորները նաև արդյունավետորեն օգտագործվում են ռոբոտիկայի ոլորտում: Սենսորները օգտագործվում են ռոբոտիկայում՝ դարձնելու համար ռոբոտների սիտուակային գիտելիքները ավելի լավ: Այս կոնցեպցիան դարձնում է ռոբոտների կարողությունը նավիգացիաներում իրենց շուրջևարկումներում և օբյեկտների հետ փոխազդելու ավելի լավ: Օրինակ, եթե ռոբոտը օգտագործվում է ապահովատունում, ապա այն կարող է օգտագործել լազերային տրիանգուլացիայի սենսորներ՝ հանգումներից պահելու և փաթեթները վերցնելու առանց լազերային 悍հոգնական ռոբոտային համակարգ . Դանավոր, երբ կատարում են տարբեր խնդիրներ, դա դարձնում է ռոբոտները ավելի արդյունավետ և ճշգրիտ:
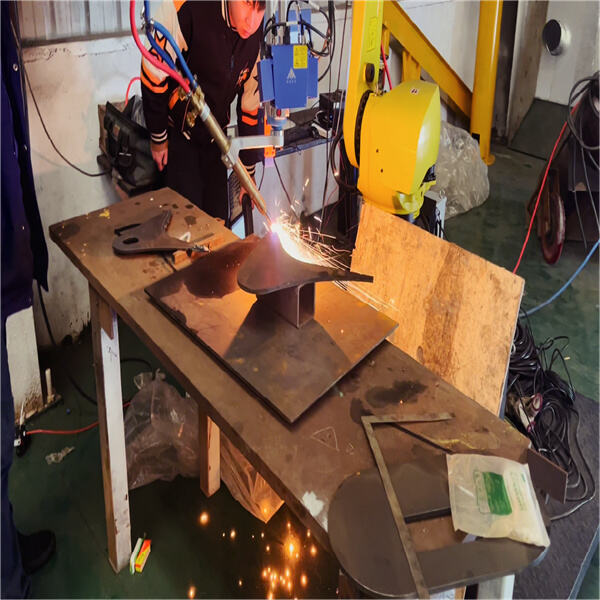
Կարգավորման ուսուցիչ կառավարումը պroductions կետում է, որ ապահովում է այն, որ ապարատները ճիշտ են և որոշակի ստանդարտներին համապատասխանելիս։ Արտադրության ուսուցիչ կառավարման գործընթացներում՝ որոնք գտնում են, որ արդյոք բոլոր ապարատները ճիշտ են արտադրվում, լեզերի տրիանգուլացիայի սենսորները կարող են դադարել լուծում։ Օրինակ՝ դրանք կարող են չափել ապարատի մասշտաբը և համոզվել, որ դա ճիշտ չափս է։ Սա առաջին ժամանակ ձգտում է սխալներին, որոնք կարող են حيحում առաջ ապարատի ավարտում։ Լեզերի տրիանգուլացիայի սենսորները ուսուցիչ կառավարման համար պարանել են դեfects-ները և համոզվել, որ միայն ճիշտ ապարատները ուղարկվում են հաճախորդներին։ laser ճառագայթի սենսոր կարող են չափել ապարատի մասշտաբը և համոզվել, որ դա ճիշտ չափս է։ Սա առաջին ժամանակ ձգտում է սխալներին, որոնք կարող են حيحում առաջ ապարատի ավարտում։ Լեզերի տրիանգուլացիայի սենսորները ուսուցիչ կառավարման համար պարանել են դեfects-ները և համոզվել, որ միայն ճիշտ ապարատները ուղարկվում են հաճախորդներին։
Լեզերի տրիանգուլացիայի սենսորների տեխնոլոգիայի ապագա Այսպիսով տեխնոլոգիան անցնում է քայլեր, դրանք լեզերային մոտեցման սենսոր կարող է դառնալ միայն ավելի կենսավոր ավտոմատացման մեջ և ավելի շատ: Նոր հետաքրքիր ձևեր օգտագործելու համար, որոնք կդարձնեն մեխանիզմները և ռոբոտները ավելի պատերազմունքական և ավելի արդյունավետ: Օրինակ, ապագան ավտոմատացված մաքսայինները կարող են օգտագործել լազերային տրիանգուլացիայի սենսորները դիտարկելու և հեռացնելու 嶂երի համար: Նաև կարող են օգտագործվել մեդիկամենտ սարքերում, որպեսզի օգնեն բժշկներին կատարել գործողությունները ավելի ճշգրիտ և ան전 ձևով: Այս սենսորների կիրառման համարները վիրտուալապես սահմանափակ չեն!
Beijing Minyue Technology Co.,LTD, որը համարվում է աշխարհի նախկին գեղատեսական տехնոլոգիայի կազմակերպությունը՝ արդյոք ինդուստրիալ ռոբոտների ոչ տարածաշրջանային ինտելեկտուալ կիրառման ոլորտում։ Մենք մասնագետ ենք առանց ծրագրավորման սեփական ինտելեկտուալ UFACTURING-ի վրա, օգտագործելով մեր սեփական արտադրած RobotSmart - Ինտելեկտուալ 抉cision Making System, SmartVision - Binocular Structured Light Vision System և SmartEye - Laser Vision Seam Tracking System։ Առաջարկում ենք նոր գերասենյակային ինտելեկտուալ ռոբոտային համեմատում և ստիրում լուծումներ։
Առաջարկում է հզոր վիճակագրական ռոբոտ, որը ենթադրում է առաջի բեռնում, կողմից բեռնում, փոխադարձ բեռնում, գանտրի մուտք, բանավեճ տրայեկտորիայի պլանավորում մի քանի ռոբոտների համար, մի քանի արտաքին առանցքների և դիրքաշրջի համատեղումների: Հասնում է ռոբոտի շարժման միմաստիկական մոդելավորման, հարթադիրքի հայտնաբերում, միակության հանգումից խուսափումին և առանցքի սահմանների հայտնաբերում։
Արագ, ճշգրիտ, լինելով անծրագրային, բարձր արդյունավետությամբ և բարձր ճշգրտությամբ։ Դա լուծում է pä դարձնում է ավելի հեշտ այն բարդ ուսուցման գործընթացը, որը հանդիսանում է تقليստական ռոբոտների համար, ավելացնելով ուսուցման գործընթացի կանգ ժամանակը։
Օգտագործում է գտնելու և հետևելու ֆունկցիան, սկանավորելով վիճbum հատվածը, հաստատելով վիճbum հատվածի դիրքը և տեղեկատվությունը, որպեսզի حيحուղանակենք վիճbum դիրքը միջև 3D թվային մոդելային գծագրում և իրական աշխատանքային մասին, լուծելով վիճbum սխալների պատճառով մուտքային նյութերի սխալների և ջերմային դեֆորմացիայի պատճառով։
 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK








