Ի՞նչ է լազերային հեռավորության սենսորը։ Այսօր մենք քեզ կխոսենք այն մասին, թե ինչպես են մաքինաները կարող են չափել հեռավոր օբյեկտները՝ չեն չափելու դեպքում
في العديد من المهن والصناعات، يغيّر تقنية الليزر حقًا قياس المسافات. بفضل الليزر، نحن قادرون على قياس المسافات بسرعة ودقة متزايدتين.

في مجالات مختلفة، هناك فوائد عديدة لأجهزة استشعار المسافة بالليزر. على سبيل المثال، يمكن للأطباء في المجال الطبي استخدام هذه المستشعرات الليزرية لجمع قياسات المسافة
Լեզերական հեռավորության սենսորների ճշգրտությունը և ճշգրտությունը նրա ամենացածկալի հնարավորություններից մեկն է: Դա նշանակում է, որ դրանք չափում են հեռավորությունները ամենամանր մանրամասն հնարավոր մասերում՝ ինչից դրանք ենթարկվում են շատ բնագավառներում: Տվյալները այն են, որով ՀԱ-ն սովորում և սեղմում է ինքն իրեն — ՀԱ մոդելը սեղմում է տվյալների վրա մինչև որոշակի պահ — այն

Լեզերական հեռավորության սենսորները ունեն շատ արյունավոր և հաստատուն ապագան: ឥ օրս գիտնականները և ինժեներն աշխատում են նոր տարբերակներ ստեղծելու համար՝ դրանք ավելի լավ, արագ և
Beijing Minyue Technology Co.,LTD, որը համարվում է աշխարհի նախկին գեղատեսական տехնոլոգիայի կազմակերպությունը՝ արդյոք ինդուստրիալ ռոբոտների ոչ տարածաշրջանային ինտելեկտուալ կիրառման ոլորտում։ Մենք մասնագետ ենք առանց ծրագրավորման սեփական ինտելեկտուալ UFACTURING-ի վրա, օգտագործելով մեր սեփական արտադրած RobotSmart - Ինտելեկտուալ 抉cision Making System, SmartVision - Binocular Structured Light Vision System և SmartEye - Laser Vision Seam Tracking System։ Առաջարկում ենք նոր գերասենյակային ինտելեկտուալ ռոբոտային համեմատում և ստիրում լուծումներ։
Արագ, ճշգրիտ, լինելով անծրագրային, բարձր արդյունավետությամբ և բարձր ճշգրտությամբ։ Դա լուծում է pä դարձնում է ավելի հեշտ այն բարդ ուսուցման գործընթացը, որը հանդիսանում է تقليստական ռոբոտների համար, ավելացնելով ուսուցման գործընթացի կանգ ժամանակը։
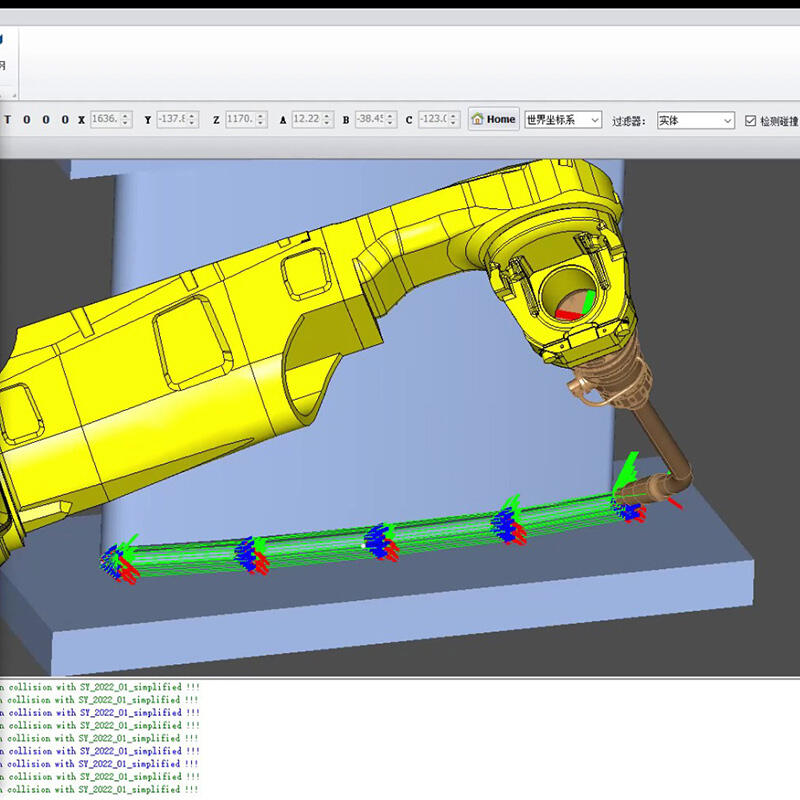
Առաջարկում է հզոր վիճակագրական ռոբոտ, որը ենթադրում է առաջի բեռնում, կողմից բեռնում, փոխադարձ բեռնում, գանտրի մուտք, բանավեճ տրայեկտորիայի պլանավորում մի քանի ռոբոտների համար, մի քանի արտաքին առանցքների և դիրքաշրջի համատեղումների: Հասնում է ռոբոտի շարժման միմաստիկական մոդելավորման, հարթադիրքի հայտնաբերում, միակության հանգումից խուսափումին և առանցքի սահմանների հայտնաբերում։
Օգտագործում է գտնելու և հետևելու ֆունկցիան, սկանավորելով վիճbum հատվածը, հաստատելով վիճbum հատվածի դիրքը և տեղեկատվությունը, որպեսզի حيحուղանակենք վիճbum դիրքը միջև 3D թվային մոդելային գծագրում և իրական աշխատանքային մասին, լուծելով վիճbum սխալների պատճառով մուտքային նյութերի սխալների և ջերմային դեֆորմացիայի պատճառով։
 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK







