Այդպիսի անկյունային կտրումների մաքինաները ոչ միայն թույլ են տալիս անձանց աշխատանքում կատարել անկյունային կտրումներ, այլ և ստորև նշված չի պետք լինել անձանց աշխատանք։ Այս MINYUE կողմնակ ռոբոտային ինտելեկտուալ սարքման ստացիոնար շատօգնումենթաստիցուղարկելուհամար:MINYUEնաևստիգելապատվիրողսառըբաժանելուհամարմեքանիզմ:Դիտենք,թեինչպեսայդհարավագույնտեխնոլոգիաէփոխումաշխատարաններըևօգնումէօպերատորներինավելիմանրահատուկևարագագործում:
Նոր տեխնոլոգիան անընդհատ է բարձրացնում կոտորակի ստիպելիք մաքնիների հնարավորությունները: Smart machines from MINYUE are paving the way for the future of cutting tools. MINYUE Երկարական անոթի վարդապման ստացիոնար թողնում է աշխատակիցներին կատարել ճշգրիտ ստիպելիքներ տարբեր անկյուններում, խնայելով դրանց շատ ժամանակ և դրա դեպքում ազդեցությունը դրանց աշխատանքի ճշգրտության վրա: Այս մաքնին թողնում է աշխատակիցներին պարտադիր չի լինել և կարող են միացնել ավելի շատ իրենց աշխատանքներին ճիշտ կատարելու: Այս նոր տեխնոլոգիան իրականում է բարձրացնում գործարանների աշխատանքը և օգնում է դրանք ավելի արագ, կառուցված և արդյունավետ։

MINYUE ավտոմատ սեղանակի հոդվածքը նոր ուժ է տալիս تقليստացի շնորհողների համար տարբեր նյութերի սահքի ձևափոխությանը։ Այս համեմատագրությամբ մեքենան ընտրում է անկյունները շնորհողներից։ Երբեմն դրանք սահքում են անկյունը, մեքենան ավտոմատ կապում է մնացած աշխատանքը։ Այս առարկան թույլ է տալիս շատ ժամանակ խանգարել և նվազեցնել սխալների ռիսկը՝ արագացնելով և ավելի վստահելի դարձնելով սահքը։ Եվ, ինչպես հայտնի է, սահքի շարունակությունը շարունակությամբ այլ խարանջներից և մակերևույթներից՝ առանց ավելացնելու գործիքների կամ նորից սահմանելու՝ դրանք պարզապես պտտվում են սարքը այն ուղղությամբ, որը ցանկանում են սահքել այն պահին։ Սա թույլ է տալիս շնորհողներին անցնել տարբեր պրոեկտներին։
MINYUE Այս տեխնոլոգիայի օգտագործմամբ շնորհողները կարող են իրենց սահքի աշխատանքը ավելի արագ և առանց սխալների կատարել։ Ավտոնոմ աշխատանքային վարունքը հանդիսանում է սահքի անկյուններից գործունեությունը՝ համոզելով, որ շնորհողները կատարում են ճշգրիտ սահքեր յուրաքանչյուր անգամ։ Այս MINYUE 8-առանց կանտիլևեր ռոբոտային 捍գելի աշխատանքային վայր ավելացնում է կարգավիճակն ու դաստանգին աշխատարաններում և երկար ժամանակի ընթացքում խանգիրում է ժամանակ և գումարներ աշխատողներին։ Սա նշանակում է, որ ավելի շատ աշխատանք կարող է կատարվել պակաս ժամանակում, ինչը հայտնի է բոլոր կողմերի համար։

Եվ կատարել ստորակետ կտրումներ, MINYUE-ի ամենասենյակ մաքինան ձեզ անհրաժեշտ գործիքն է։ Աշխատողները կարող են կտրել ճշգրիտ կտրումներ առանց այլ խառնարանների՝ օգտագործելով այս առաջադրանքային տեխնոլոգիան։ Դա ապահովում է, որ յուրաքանչյուր կտրում կատարվի ճշգրիտ, փոքրացնելով հանգույցները և բարձրացնելով որոշակիությունը։ Աշխատարանների համար, որոնք ուրախ են արդյունքներից, այս MINYUE 9-առանցի կանտիլեվեր ռոբոտային 捍. workstation դա դարձնում է այն ավելի հեշտ։ Դա թույլ է տալիս աշխատողներին զգալ ավելի անվտանգ՝ գիտելով, որ մաքինան կօգնի իրենց կատարել լավագույն կտրումները, որոնք կարող են ունենալ։
Արագ, ճշգրիտ, լինելով անծրագրային, բարձր արդյունավետությամբ և բարձր ճշգրտությամբ։ Դա լուծում է pä դարձնում է ավելի հեշտ այն բարդ ուսուցման գործընթացը, որը հանդիսանում է تقليստական ռոբոտների համար, ավելացնելով ուսուցման գործընթացի կանգ ժամանակը։
Beijing Minyue Technology Co.,LTD, որը համարվում է աշխարհի նախկին գեղատեսական տехնոլոգիայի կազմակերպությունը՝ արդյոք ինդուստրիալ ռոբոտների ոչ տարածաշրջանային ինտելեկտուալ կիրառման ոլորտում։ Մենք մասնագետ ենք առանց ծրագրավորման սեփական ինտելեկտուալ UFACTURING-ի վրա, օգտագործելով մեր սեփական արտադրած RobotSmart - Ինտելեկտուալ 抉cision Making System, SmartVision - Binocular Structured Light Vision System և SmartEye - Laser Vision Seam Tracking System։ Առաջարկում ենք նոր գերասենյակային ինտելեկտուալ ռոբոտային համեմատում և ստիրում լուծումներ։
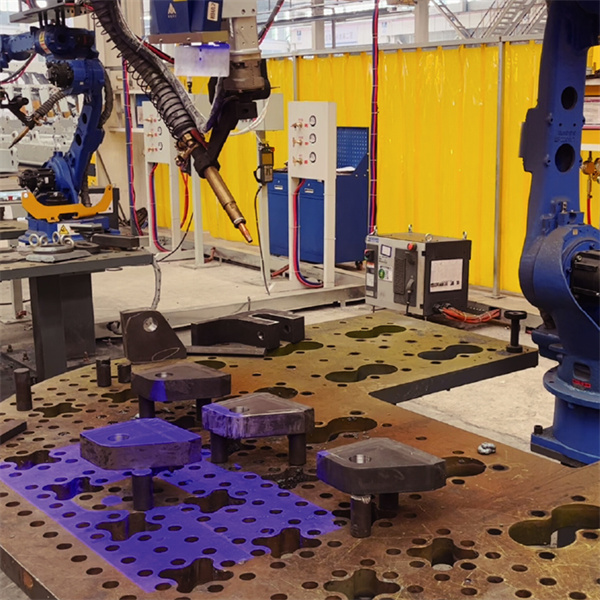
Օգտագործում է գտնելու և հետևելու ֆունկցիան, սկանավորելով վիճbum հատվածը, հաստատելով վիճbum հատվածի դիրքը և տեղեկատվությունը, որպեսզի حيحուղանակենք վիճbum դիրքը միջև 3D թվային մոդելային գծագրում և իրական աշխատանքային մասին, լուծելով վիճbum սխալների պատճառով մուտքային նյութերի սխալների և ջերմային դեֆորմացիայի պատճառով։
Առաջարկում է հզոր վիճակագրական ռոբոտ, որը ենթադրում է առաջի բեռնում, կողմից բեռնում, փոխադարձ բեռնում, գանտրի մուտք, բանավեճ տրայեկտորիայի պլանավորում մի քանի ռոբոտների համար, մի քանի արտաքին առանցքների և դիրքաշրջի համատեղումների: Հասնում է ռոբոտի շարժման միմաստիկական մոդելավորման, հարթադիրքի հայտնաբերում, միակության հանգումից խուսափումին և առանցքի սահմանների հայտնաբերում։
 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK