Երբեք դیدել եք այնքան գեղեցիկ ֆիլմ կամ խաղացել հետաքրքիր տարածաշրջանային խաղ, որտեղ նկարները նախանիշապես դուրս էին դուրս էկրանից: Այդ հատուկ արդյունքի համար ձեր աչքերում կա 3D stereo նայանոց: MINYUE 3D տեսական դիտարկիչ հանդիսանում է գեղեցիկ և մեծ տեխնոլոգիա, որը արժանցնում է բաներին այն տեսքը, որ դրանք ուղղապես մոտենում են մեզ. Բայց թե ինչպես է վերցնում այս հետաքրքիր գործը իրական կյանքում?
Երբ մենք նայում ենք ինչ-որ բանի վրա մեր աչքերով, յուրաքանչյուր աչք տեսնում է 짝անց տարբեր պատկեր։ Մեր ուղեղները շատ աստ捷ություն ունեն և միացնում են այս երկու պատկերները միակ հարթության մեջ՝ տալիս խորություն, իսկ խորությունը հավասար է չափանին։ Սա թույլ է տալիս մեզ տեսնել եռաչափ տարածության մեջ, ինչը թույլ է տալիս մեզ գիտել օբյեկտները որպես ավելի իրական/կյանքանոց։ Արդյոք դա չէ շատ հետաքրքիր?
Այստեղ մենք կփորձենք ավելի խորաց հետ ծանոթանալ 3D ստերեո տեսության աշխատանքին և նրա նորության մանրամասներին: Հարկավոր է ստեղծել այդ հետաքրքիր երրորդ չափումը, հատուկ Brill կամ էկրաններ ուղղում են տարբեր պատկերներ մեր աչքերին: Այդ պատկերները երկար են տարբերվում, և այդ տարբերությունը անգամ սերտացնում է մեր ուղեղներին՝ խորհուրդ տալիս խորություն:
Այդեavor երկու մեթոդները տարբերվում են նրանով, թե ինչպես իրականացնում են 3D стереո տեսքը: Օրինակ, օգտագործվում են տարբեր մեթոդներ, ներառյալ պոլարիզացված հողամասներ կամ ակտիվ շատր հողամասներ: Յուրաքանչյուր մեթոդ ունի իրարից տարբեր տեխնիկա յուրաքանչյուր ուտեսուն հատվածի տեսանկյունները ցուցադրելու համար: Եվ երբ դրանք միացվում են, այդ տեխնոլոգիաները ստեղծում են հետաքրքիր և ներդրված փորձ, որը թույլ է տալիս մարդկանց՝ զգալ, որ մենք մասնակի ենք դействիան։
Դուք գիտե՞ք, որ 3D ստերեո տեսքը նաև օգտագործվում է բժշկության մեջ։ Այս հանգամանքային տեխնոլոգիան տալիս է բժիշկներին և վիրաբժիշկներին շատ ավելի սահմանափակ տեսանկյուն մարդկային մարմնի ներսում։ Բժշկական մասնագետները օգտագործում են MINYUE-ն 3D տեսական դիտարկիչ այնպես, որ նրանք ստեղծում են մեր օրգանների և տիssueների պատկերներ ավելի ճշգրիտ, քան ինչ-որ անգամ առաջ անց ախտորոշելու և բուժելու առողջական խնդիրներ։
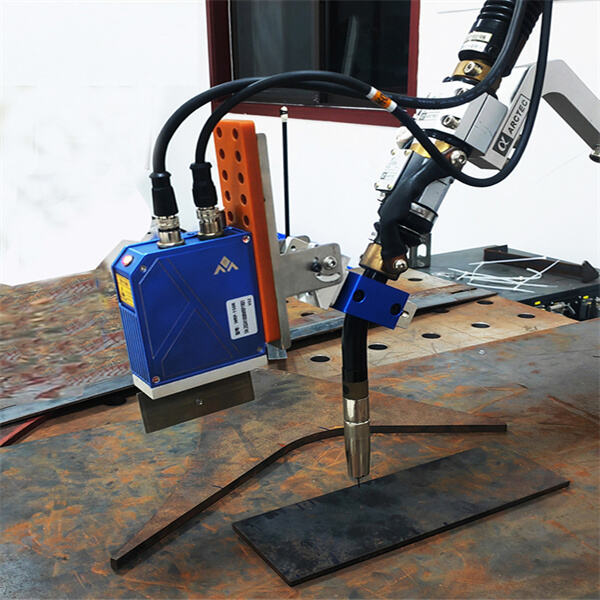
Այս հետաքրքիր բժշկական պատկերացումի առաջադրանքները գտնվում են MINYUE-ի ստեղծագործական սահմաններում։ Այս սկիզբնավորումը կիրառում է MINYUE-ն 3d machine vision camera փոխել դուրսբանների մատնացույցը մարդկային մարմնի վերաբերյալ: Այս նոր տեխնոլոգիա այդ բաժանումը փակում է, փոխհաջողություններ պաշտպանում և արժանացնում հասարակի ուղեկցությունը: Դուրսբանները կատարում են ավելի լավ որոշումներ և օգնում են մարդկանց արագ զարթնել 3D պատկերացումի միջոցով:
Կարող եք նաև փոխանցել ձեր սարքի կարգավորումները՝ որպես մի եղանակ 3D արդյունքի մշակման համար: Կարող եք կարգավորել MINYUE երկական տեսական դիտարկիչ արյունությունը և խորությունը, որպեսզի ամենինչ նաև լավ նայած լինի, օրինակ: Պարզապես ունեք բեռնավորված 3D արագացի և սկսեք փորձել տարբեր նյութեր, որպեսզի գտնեք, ինչ է ամենալավը ձեզ համար: Մի քիչ վարժություն և խաղավոր փորձարկում կինքնարկեն մի արագացական ներդրման փորձը ստեreo նայանոց աշխարհում:
Beijing Minyue Technology Co.,LTD, որը համարվում է աշխարհի նախկին գեղատեսական տехնոլոգիայի կազմակերպությունը՝ արդյոք ինդուստրիալ ռոբոտների ոչ տարածաշրջանային ինտելեկտուալ կիրառման ոլորտում։ Մենք մասնագետ ենք առանց ծրագրավորման սեփական ինտելեկտուալ UFACTURING-ի վրա, օգտագործելով մեր սեփական արտադրած RobotSmart - Ինտելեկտուալ 抉cision Making System, SmartVision - Binocular Structured Light Vision System և SmartEye - Laser Vision Seam Tracking System։ Առաջարկում ենք նոր գերասենյակային ինտելեկտուալ ռոբոտային համեմատում և ստիրում լուծումներ։
Արագ, ճշգրիտ, լինելով անծրագրային, բարձր արդյունավետությամբ և բարձր ճշգրտությամբ։ Դա լուծում է pä դարձնում է ավելի հեշտ այն բարդ ուսուցման գործընթացը, որը հանդիսանում է تقليստական ռոբոտների համար, ավելացնելով ուսուցման գործընթացի կանգ ժամանակը։
Առաջարկում է հզոր վիճակագրական ռոբոտ, որը ենթադրում է առաջի բեռնում, կողմից բեռնում, փոխադարձ բեռնում, գանտրի մուտք, բանավեճ տրայեկտորիայի պլանավորում մի քանի ռոբոտների համար, մի քանի արտաքին առանցքների և դիրքաշրջի համատեղումների: Հասնում է ռոբոտի շարժման միմաստիկական մոդելավորման, հարթադիրքի հայտնաբերում, միակության հանգումից խուսափումին և առանցքի սահմանների հայտնաբերում։
Օգտագործում է գտնելու և հետևելու ֆունկցիան, սկանավորելով վիճbum հատվածը, հաստատելով վիճbum հատվածի դիրքը և տեղեկատվությունը, որպեսզի حيحուղանակենք վիճbum դիրքը միջև 3D թվային մոդելային գծագրում և իրական աշխատանքային մասին, լուծելով վիճbum սխալների պատճառով մուտքային նյութերի սխալների և ջերմային դեֆորմացիայի պատճառով։
 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK








