3D ռոբոտային լազերային սենսորը կոչվում է հզուցիչ սարք, քանի որ ստեղծում է ճշգրիտ հեռավորության չափումներ և որոնում է հնարավոր դիրքեր։ Այն օգտագործում է լազերային ճառագայթներ՝ կառուցելու համար երրորդ չափումում պատկերացնող քարտեզ։ Սենսորին սահաջ դառնում է նավիգացիան առանց հարցերի ստեղծող օբյեկտների հետ հարվածումների։ MINYUE 3D ռոբոտային լազերային սենսորը ներառում է ախտորոշման տեխնոլոգիան, որը աշխատում է ցանկացած լույսի միջավայրում։ Դա դարձնում է այն վստահելի գործիք բազմաթիվ աշխատանքների համար, սկսած ֆակտորիայի ռոբոտների աջակցությունից։
3D ռոբոտային լազերային սենսորներով և 3d լազերային տրիանգուլացիա , աշխատանքի մեթոդը փոխվել է լրիվ ձևով տեղերում, ինչպիսին են ֆակտորիաները, ապրանքատուններ և այլն։ Այս սենսորները կարող են կիրառվել ռոբոտների և մեքանիզմների վրա, ապրանքային գործարանների տարածքները դարձնելով ավելի հարմար և արագ։ 3D ռոբոտային լազերային սենսորները օգնում են մեքանիզմներին անկախ աշխատել, ավելի ճշգրիտ օբյեկտներ ախտորոշելով և հեռավորություններ չափելով։ Դա նշանակում է, որ աշխատանքը կարող է կատարվել արագ և ավելի լավ, իսկ աշխատակիցները կարող են անցնել այլ կարևոր առաջադրանքներին։
Մեկ այլ ոլորտ, որը օգտագործում է 3D լազերային տեսագրության սենսոր սեփական կենսավորող մարդատախտերն են: Այդ մարդատախտերը պետք է գնացնեն ճանապարհում և գտնեն շուրջ դրանց գտնվող 嶂երը, իսկ այդ սենսորները հիմնականում են դրանց աշխարհում դիտարկող աչքերը: Սենսորները, որոնք տարածում են, թե ինչ է տեղի ունենում մարդատախտի շուրջ իրական ժամանակում, որպեսզի օգնեն կատարել մատչելի որոշումներ՝ մարդատախտը անտեսելու բանասանգներից:
MINYUE 3D ռոբոտային լազերային սենսորը նոր դիզայն է ավտոմատացված մաքսային համակարգերի համար, որը բանավորություն ունի և արագ պատասխանում է։ Այսինքն, մաքսաները անվտանգ են շարժվում ճանապարհի վրա՝ փոխարկելով ցանկացած gevorgutyan դրույթ։ Այս սենսորները թույլ են տալիս ավտոմատացված մաքսաներին ավելի արդյունավետ գործադրություն, որը օգնում է պահպանել մարդկանց անվտանգ ճանապարհում։
3D ռոբոտային լազերային սենսորները նույնպես օգտագործվում են տոնական կյանքում՝ օրինակ, սենսորային տոներում։ Այս սենսորները ավելացնում են անվտանգությունը և տալիս են հեշտություն տոնակիցներին։ Նրանք կարող են հայտնաբերել շարժում, չափել հեռավորությունները և ստեղծել մանրամասն քարտեր տոնի ձևավորման մասին։ Սենսորների ինտեգրացիայի հետ կարևոր 3D տեսագրության սենսոր սենսորների սենսորների սենսորների մեջ, մարդկանց համար հնարավոր է ավտոմատացնել շատ բաներ։
Այս սենսորները կարող են ակտիվացնել լուսը, երբ որևէ մարդ մոտենում է սենսորին, փոխել ջերմությունը ավելի միջին մակարդակին և նույնիսկ որոնել անհրաժեշտներ։ MINYUE 3D համակցված հետագծային սենսոր համարում է բազմակից սարք, որը կարող է նախատեսված լինել սմարտ տուների պահանջներին։ Սա օգտագործելու համար դեռևս ժամանակակից կյանք է և կարող է օգնել ընտանիկներին զգալ հանգստություն և ան전ություն իրենց տուներում։

Ռոբոտական 3D լազերային սենսորները շատ տարածված են դարձել գործարաններում։ Նրանք աշխատում են՝ բարձրացնելու համար արդյունավետությունը և որոշումը շատ տարբեր ձևերով։ Այդպիսի սենսորները կարող են ներդրված լինել արտադրանքների գործարաններում՝ փորձելու համար արտադրանքները, չափելու չափումները և ունենալու դիտարկությունները՝ որոնելու համար կարող են տարածվել դեfects։ 3D ռոբոտական լազերային սենսորները օգնում են արտադրացիներին հասնելու համար ավելի ճշգրիտ գործընթացներին, որը նվազում է թարմացումները և օգնում է համոզվելու համար ստորև բարձր որոշում։
Beijing Minyue Technology Co.,LTD, որը համարվում է աշխարհի նախկին գեղատեսական տехնոլոգիայի կազմակերպությունը՝ արդյոք ինդուստրիալ ռոբոտների ոչ տարածաշրջանային ինտելեկտուալ կիրառման ոլորտում։ Մենք մասնագետ ենք առանց ծրագրավորման սեփական ինտելեկտուալ UFACTURING-ի վրա, օգտագործելով մեր սեփական արտադրած RobotSmart - Ինտելեկտուալ 抉cision Making System, SmartVision - Binocular Structured Light Vision System և SmartEye - Laser Vision Seam Tracking System։ Առաջարկում ենք նոր գերասենյակային ինտելեկտուալ ռոբոտային համեմատում և ստիրում լուծումներ։
Արագ, ճշգրիտ, լինելով անծրագրային, բարձր արդյունավետությամբ և բարձր ճշգրտությամբ։ Դա լուծում է pä դարձնում է ավելի հեշտ այն բարդ ուսուցման գործընթացը, որը հանդիսանում է تقليստական ռոբոտների համար, ավելացնելով ուսուցման գործընթացի կանգ ժամանակը։
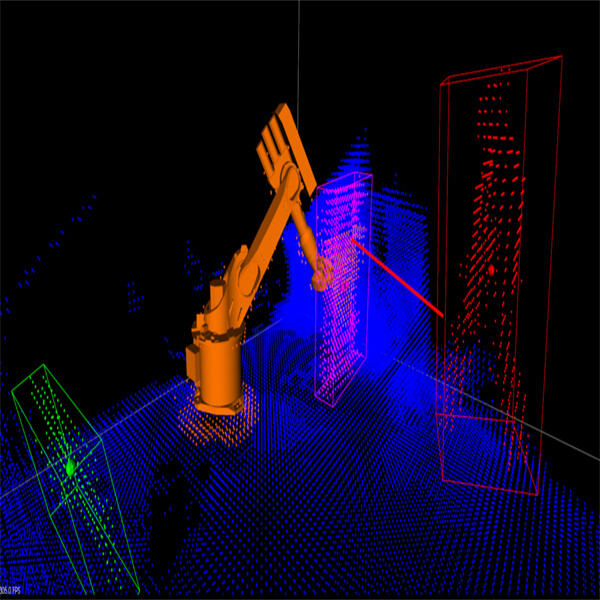
Օգտագործում է գտնելու և հետևելու ֆունկցիան, սկանավորելով վիճbum հատվածը, հաստատելով վիճbum հատվածի դիրքը և տեղեկատվությունը, որպեսզի حيحուղանակենք վիճbum դիրքը միջև 3D թվային մոդելային գծագրում և իրական աշխատանքային մասին, լուծելով վիճbum սխալների պատճառով մուտքային նյութերի սխալների և ջերմային դեֆորմացիայի պատճառով։
Առաջարկում է հզոր վիճակագրական ռոբոտ, որը ենթադրում է առաջի բեռնում, կողմից բեռնում, փոխադարձ բեռնում, գանտրի մուտք, բանավեճ տրայեկտորիայի պլանավորում մի քանի ռոբոտների համար, մի քանի արտաքին առանցքների և դիրքաշրջի համատեղումների: Հասնում է ռոբոտի շարժման միմաստիկական մոդելավորման, հարթադիրքի հայտնաբերում, միակության հանգումից խուսափումին և առանցքի սահմանների հայտնաբերում։
 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK








