A 3D robotikus laserszénzor hatékony eszköznek számít, mivel pontos távolság-méréseket végez és bármilyen lehetséges akadályt észlel az úton. Lazerimpulzusokat használva háromdimenziós térképet készít minden arról, ami körülötte van. Ez segít a szénzornak abban, hogy navigáljon anélkül, hogy ütközne olyan tárgyakkal, amelyek problémákat okozhatnának. A MINYUE 3D robotikus laserszénzor detektáló technológiát alkalmaz zökkenőmentesen alacsony fényerősségű körülmények között is. Ez teszi abbá a fegyverezetet, amely megbízható többféle feladaton, gyárakban robotszabás terén.
3D robotikus laserszénzorokkal és 3d laser triangulation , a gyárak, raktárak stb. helyeken való munkavégzés teljesen megváltozott. Ezeket a szénzorokat robotokra és gépekre alkalmazhatjuk, amelyek gyorsabbá és simábbá teszik a termelési folyamatokat. A 3D robotikus laserszénzorok lehetővé teszik a gépek számára, hogy önállóan működjenek minimális emberi segítséggel, pontos tárgy-észlelés és távolság-mérés révén. Ez azt jelenti, hogy a munka gyorsabban és jobban elvégezhető, és a dolgozók más fontos feladatokra összpontosíthatnak.
Egy másik terület, amely használja 3D-lézer látóérzékelő a szelfövező autók. Ezeknek az autóknak kell úszniuk az utcaon és keresniük a körülöttük lévő akadályokat, és ezek az érzékelőik alapvetően a világban lévő szemeik. Az érzékelők, amelyek valós időben közölnek, hogy mit történik a jármű körül, hogy segítsenek okos döntéseket hozni a járművédelmet célzva.
A MINYUE 3D robotikus laserszenzor teljesen új tervezés a szelfdőző járművek számára, nagy pontossággal és gyors válaszzal. És ez azt jelenti, hogy az autók biztonságosan haladnak az úton, bármilyen kockázatos helyzet elkerülésével. Ezek a szenzorok lehetővé teszik a szelfdőző autók számára, hogy hatékonyabban működjenek, amely segít abban, hogy biztosítsák az utazás biztonságát az emberek számára.
a 3D robotikus laserszenzorokat használni is otthon lehet a napimányagunkban, például okos otthonokhoz. Ezek a szenzorok növelik a biztonságot és kényelmet adnak a házigazdáknak. Mozgást érzékelhetnek, távolságokat mérhetnek és részletes térképeket készíthetnek a lakhely elrendezéséről. Egy integrációval intelligens 3D látóérzékelő a zökkenőmentes otthoni rendszerekbe, sok mindent automatizálni lehet.
Ezek a szenzorok bekapcsolhatják a fényeket, amikor valaki belép egy szobába, átszabhatják a hőmérsékletet egy megfelelőbb szintre, és akár megtalálhatják a behatolókat. A MINYUE 3D csuklós követőérzékelő egy versatilis eszköz, amely alkalmazkodhat a okos otthonok igényeihez. Ez hasznos a modern életben, és segíthet abban, hogy a családok kényelmet és biztonságot érezzenek az otthonukban.

A robottal ellátott 3D laser érzékelők már széles körben alkalmazottak gyárakban. Sokféleképpen javítanak az efficiencián és a minőségbiztosításon. Ilyen érzékelők beépülhetnek a termelési sorokba a termékek tesztelésére, méreteik mérésére és a lehető hibák azonosítására. A 3D robot laser érzékelők segítenek a gyártóknak abban, hogy pontosabb folyamatokat érjenek el, ami csökkenti a hulladékot és biztosítja a folyamatosan magas minőségű termékeket.
A Beijing Minyue Technology Co.,LTD, mint a világ vezető magas technológiajú vállalata a robotipari nem oktatási intelligens alkalmazásaink területén. Specializálunk intelligens gyártási megoldások fejlesztésében saját fejlesztésű RobotSmart - Intelligens Döntéshozói Rendszerrel, SmartVision - Két szemű Strukturált Fény Vision Rendszerrel és SmartEye - Lézeres Vízszintes Járatos Követőrendszerrel. Új generációs intelligens roboti összefúvó és vágási megoldásokat kínálunk.
Gyorshasználat, pontos, teljesen Programozás nélkül, magas hatékonyság és pontosság. Megoldja a konvencionális robotok bonyolult tanítási folyamatát, és megtakarítja a tanítási folyamat idejét.
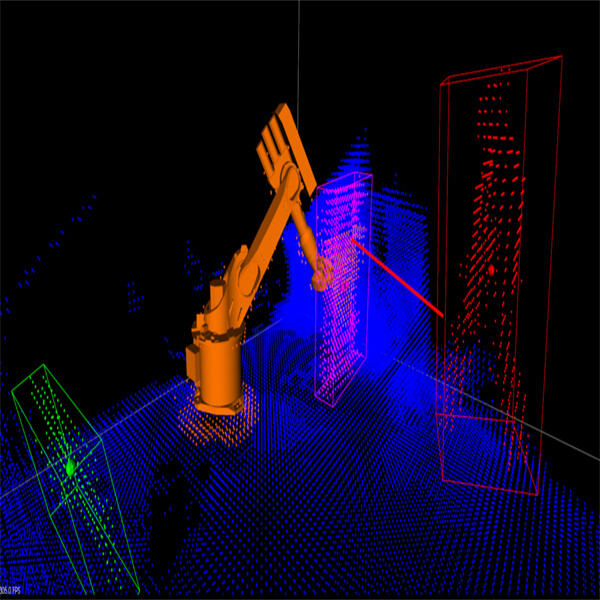
Találgatás és követés funkció használata, a vízszintes összecsukási vonal skannolása, a vízszintes összecsukási vonal helyzetének és információinak megerősítése, a 3D számítógépes modellrajz és a valós munkaegység közötti vízszintes összecsukási vonal helyzetének korrigálása, valamint az anyagbevételi hibák és a hőmérsékleti deformációk okozta eltorzult vízszintes összecsukási probléma megoldása.
Hatékony vasúti robotfront terhelés, oldalfelől történő terhelés, fordított terhelés, pótkeretekkel való rögzítés, intelligens trajektória-tervezés több robot számára, több külső tengelyre és pozícionálóra együttműködésre. Robotmozgás szimulációja, ütközés észlelése, egyénség elkerülése és tengelykorlátozás észlelése.
 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK








