EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK


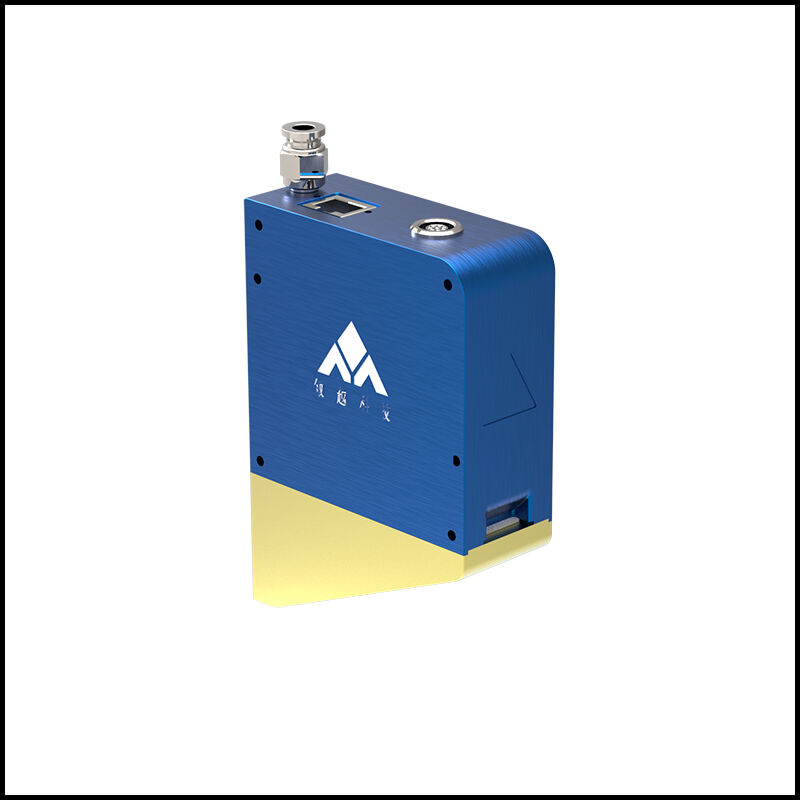
MY-220-164 lézeres varratkövető érzékelő
A beépített követő érzékelők lézerfényt használnak a hegesztési felület megvilágítására, amely lézerfénysugarat hoz létre, és ezt egy nagyfelbontású kamera rögzíti ,Az beépített technológiai útvonalterv nagysebességű CMOS + FPGA párhuzamos számítástechnikát alkalmaz, amely lehetővé teszi a szenzor számára, hogy önállóan végezze el a számításokat ipari vezérlőszámítógép nélkül, így valódi perem-számítást (edge computing) ér el. Az algoritmus-feldolgozás révén az hegesztési varrat háromdimenziós jellemzői strukturált információvá alakulnak, beleértve a hegesztési koordinátákat, a helytelen illesztést és a hézagokat. Ez az információ továbbításra kerül a robotvezérlőhöz, így biztosítva a robot számára a szükséges hegesztési pályát és folyamatparamétereket, amelyek segítségével a robot valós idejű hegesztést hajt végre vagy korrigálja a munkadarabok eltéréseit, ezzel elérve a tökéletes hegesztési műveletet. Más megoldásokhoz képest a lézeres hegesztéskövetés olyan előnyöket kínál, mint a nem érintkezéses működés, a magas pontosság, a nagy sebesség és az erős adaptációs képesség.
- Áttekintés
- Támogatott robot márkák
A szenzor lineáris strukturált fényes mérést alkalmaz, amely gyors vonalásfelvételi sebességgel rendelkezik, nem kapcsolatba lép és nem tartalmaz mechanikus mozgást; Erős alkalmazkodási képesség, képes villamoszövetségi paraméterek kimenetére; Teljesen beágyazott, külső ipari számítógépekkel való együttműködésben, és sok más előnnyel, amely széles körben használatos különböző típusú automatizált villamoszövetségben. Függetlenül a villamoszövetségi folyamatoktól, megbízható támogatást és stabil teljesítményt nyújtunk, hogy kiváló eredményeket érjünk el különböző villamoszövetségi helyzetekben.
Az érzékelő alkalmas a legexigensebb alkalmazásokra, mivel fénytörésre, vízre és porra (IP67) nem reagál, és immun az elektromos zavarok ellen (EMC).
Erős F üggvény.
01. pozíció és eltérés korrigálása
A pozícionálási és elhelyezési korrekciós funkció használatos különböző munkatétel-egységek rugalmas összefonódási forgatókönyveiben, amelyek ugyanabban a modellben vannak, de eltérő toleranciákkal rendelkeznek. Ez a funkció biztosítja, hogy a munkatétel-egységek felváltásakor nem szükséges manuális beavatkozás, és a robotot a pozícionálási és elhelyezési korrekciós rendszer irányítja pontos összefonódáshoz.
Két pontú pozícionálás, alkalmas egyenes vonalú 2D eltolási összefonódáshoz.
Többpontos pozícionálás, alkalmas több szakaszos 2D eltolási összefonódáshoz.
Szakaszpozícionálás, alkalmas több szakaszos 3D eltolási összefonódáshoz.
02 Valós idejű nyomon követés
A valós idejű nyomon követési funkció használatos olyan összefonódási forgatókönyvekben, amelyek nagy hatékonyságot igényelnek és nem engedélyeznek térbeli zavarokat. A szenzor rögzített helyzetben van a összefonó tüskéhez viszonyítva, és a összefonó tűz automatikusan alkalmazza az összefonási útvonalakat a 3D koordinátádat alapján.
03. Szkennerelés és automatikus villamosvesszőzés
A szkenelés és automatikus összefonó funkció lehetővé teszi a szenzor számára, hogy először gyűjtsön geometriai információkat a fonókapcsolatokról. Ez a funkció alkalmas magas-reflektáló, szűk fonóterületekhez és bonyolult fonóesetekhez.
![]()
![]()
![]()
Lézer Vágás Nyomon követést
A lézeres varratkövetés kimutathatja a hegesztési varrat magasságának, mélységének és bal-jobb irányú eltérését .
Kis hézagokkal rendelkező illesztett hegesztéseket is érzékelni tud .
Megoldja a vékony lemezek illesztésénél fellépő hegesztési varrat követésének problémáját .
Az optimális megfigyelési távolság kb. 220 mm .
Támogatást hegesztési típus
V alakú fonó
Sarku fonó
Lapfelső fonó
Csatlakoztatásos összavar
Tömlővarak, stb.
![]()
Univerzális modell, IP67 védettségi fokozat, megfelelő gázvédett hegesztéshez, Elmerülő ívületes összefonás stb w munkahelyi forgatókönyv.
A WIFI modullal több érzékelő is hibakeresésre használható egyetlen Windows-tablet segítségével.
![]()
Többplatformos kommunikációt támogat PAD eszközök számára és mobiltelefonok számára
![]()
![]()
Kérjük, válassza ki az adott alkalmazási területnek megfelelő típust, hogy elkerülje a munkadarab-ütközési érzékelőt; a robot terhelése általában 10 kg körül van.
| NO | Termék neve | Specifikációk | Mennyiség | Megjegyzés | |
| 1 | Kapcsoló | KeepLink | 1 | KP-9000-104GTP | Rúd |
| 2 | Laser vonal követő érzékelő | MY-220-164 | 1 | SN:20250318LDWPR05 | Rúd |
| 3 | Érzékelő tápellátó kábel | 15 méter | 1 | hagyományos 15 m | Rúd |
| 4 | Érzékelő kommunikációs kábel | 15 méter | 1 | hagyományos 15 m | Rúd |
| 5 | Ipari számítógép és robot közötti kommunikációs vonal | NT-PT-15m | 1 | Rúd | |
| 6 | Ipari számítógép tápkábela | DC 12V | 1 | Rúd | |
| 7 | Ív-elválasztó lemez | MY–Zárt ívlemez | 1 | Rúd | |
| 8 | Érzékelő védőlencse | 5 | Rúd | ||
| 9 | Érzékelő szigetelőlemez | MY-szigetelő | 1 | Rúd | |
| 10 | Csavar kiegészítők | 1 Szett | 1 | Rúd | |
| 11 | Pneumatikus fej | POC6M5 | 1 | Rúd | |
| 12 | Tanúsítvány | / | 1 | Rúd | |
| 13 | Garancia kártya | / | 1 | Rúd |
![]()
Együttműködő partner

Támogatott robot márkák